

無人フォークリフト パレット認識機能「ForkEye(フォークアイ)」
概要
無人フォークリフトで積み下ろしを行うパレットは、設定された位置に対して一定の範囲内にパレットが配置される必要がりますが、物流の現場においては、人が操作するフォークリフトと共同でパレットを搬送する場合や、設備・機器側と連携してパレットを積み下ろしする際に、パレットの位置が設定された位置からずれてしまう場合があります。 そこで、パレット認識のための機能「Fork Eye」をCarriRo Forkに搭載することにより、上下左右方向のパレットの位置ずれを検知し軌道を修正し、位置ずれに対応した無人でのパレットの積み下ろしが行えます。

実際の画像
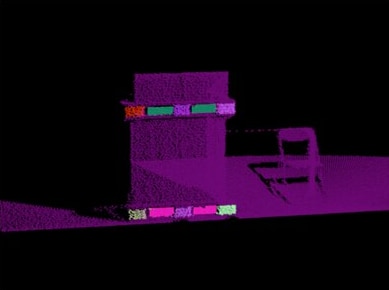
ForkEyeで認識した画像
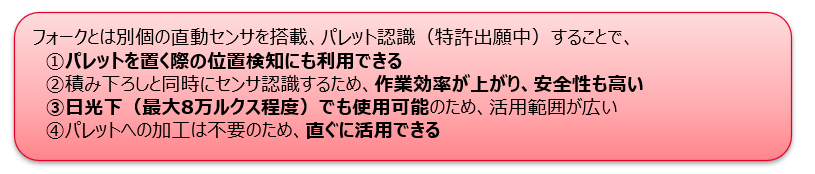
特長
他製品で検証されているパレット認識の方法
パレット認識については他社の無人フォークでも下記のような認識が行われています。
しかし、実運用上ではいくつかの課題があり無人フォークリフト普及のネックになっています。
①フォーク(可動爪)自体にセンサを搭載し、パレット認識する方法
→(課題)・荷物が遮り、パレットを置く位置の検知ができない
・荷物の積み下ろしと認識を同時にできないため、作業効率が落ちる
・認識の都度フォークを動かす必要があり、安全性に課題
②パレットにQRコードやRFIDなどを貼り、パレットを認識する方法
→ (課題)・パレットに加工を行うための作業や手間が発生する
・加工したパレット自体の管理が難しい
・暗い場所や日光下、黒いパレットでは使用できない場合が多い
パレット認識機能「ForkEye(フォークアイ)」デモ動画
パレット認識を活用した運用シーン
Fork Eye搭載のCarriRo Forkを導入することで以下のような運用にて活用いただけます。
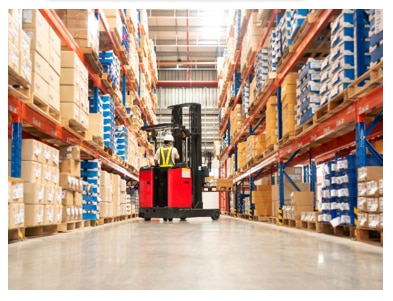
有人フォークリフトの置き場所によってパレットの位置が変わる
→パレットを認識することで、位置ずれを解決
→パレットを認識することで、位置ずれを解決

外部機器側のパレットの供給精度によってパレットの位置が変わる
→パレットを認識することで、位置ずれを解決
→パレットを認識することで、位置ずれを解決
オプション価格
価格につきましては、お気軽にお問い合わせください。






© ZMP INC. All Rights Reserved.