

自動運転プラットフォームRoboCar®シリーズ
最新モデルRoboCar® SUV


概要・特徴
「RoboCar SUV」は、市販SUV車両をベースに、ユーザーが外部装置(PCや専用装置)より制御信号を入れることで制御ができるようにZMPの制御装置を組み込んだ自動運転用の車両装置(車両本体および開発環境を含むパッケージ)です。
「RoboCar® SUV」は、従来のRoboCar®シリーズの特徴はそのままに、これまでのラインナップにはないSUVタイプの車両をベースとしました。RoboCar SUVは、RoboCar® HV/PHV/MiniVanと同様に、車載ネットワークCAN(Control Area Network)を介して、ベース車両に搭載されているセンサ情報を取得でき、且つZMP独自のコントローラによってアクセル、ブレーキとステアリングの制御が可能な車両です。
通常はドライバーの操作(アクセル・ブレーキを踏む、ステアリングを回す)で制御される車両をユーザーのコンピューターや専用装置から制御できるため、自動運転やADAS(高度運転支援システム)の開発やサービスの現場において、センサーやソフトウェアの開発・検証を実車上で行うためのプラットフォームとして活用することができます。
RoboCar SUVは車両に標準で搭載されているセンサーなどの値(車速、四輪車輪速やステアリング角度などのCAN情報)を取得でき、かつPCやその他外部装置から車載ネットワークCAN(Control Area Network)を介してアクセルやブレーキ、ステアリングなどの操作信号を入力し車両を制御することができるようになっています。またこれらのデータ取得、操作信号入力のためのAPIやサンプルアプリケーションも標準で用意しているため、導入後すぐに車両制御のプログラムを構築することができるプラットフォームとしてご提供しています。
また、従来どおりドライバーが運転することもでき、さらに車両がコンピューター制御されている最中にドライバーの操作が介入すると制御がドライバー操作に引き継がれる「オーバーライド機能」も提供しています。
「RoboCar® SUV」は、従来のRoboCar®シリーズの特徴はそのままに、これまでのラインナップにはないSUVタイプの車両をベースとしました。RoboCar SUVは、RoboCar® HV/PHV/MiniVanと同様に、車載ネットワークCAN(Control Area Network)を介して、ベース車両に搭載されているセンサ情報を取得でき、且つZMP独自のコントローラによってアクセル、ブレーキとステアリングの制御が可能な車両です。
通常はドライバーの操作(アクセル・ブレーキを踏む、ステアリングを回す)で制御される車両をユーザーのコンピューターや専用装置から制御できるため、自動運転やADAS(高度運転支援システム)の開発やサービスの現場において、センサーやソフトウェアの開発・検証を実車上で行うためのプラットフォームとして活用することができます。
RoboCar SUVは車両に標準で搭載されているセンサーなどの値(車速、四輪車輪速やステアリング角度などのCAN情報)を取得でき、かつPCやその他外部装置から車載ネットワークCAN(Control Area Network)を介してアクセルやブレーキ、ステアリングなどの操作信号を入力し車両を制御することができるようになっています。またこれらのデータ取得、操作信号入力のためのAPIやサンプルアプリケーションも標準で用意しているため、導入後すぐに車両制御のプログラムを構築することができるプラットフォームとしてご提供しています。
また、従来どおりドライバーが運転することもでき、さらに車両がコンピューター制御されている最中にドライバーの操作が介入すると制御がドライバー操作に引き継がれる「オーバーライド機能」も提供しています。
仕様
【特徴・基本性能】
・ スタイリングと走破性を両立したSUVタイプの自動運転車両
・ CAN情報取得が可能(速度、ステアリング、アクセル、ブレーキ、シフトポジションなど)
・ ZMP独自コントローラによりステアリング、アクセル、ブレーキをプログラムで操作可能
・ 自動制御モードとマニュアルモードの切り替え可能
・ オプションでカメラやレーザレンジセンサ等の外界センサ、大容量バッテリシステム、などを搭載可
・ スタイリングと走破性を両立したSUVタイプの自動運転車両
・ CAN情報取得が可能(速度、ステアリング、アクセル、ブレーキ、シフトポジションなど)
・ ZMP独自コントローラによりステアリング、アクセル、ブレーキをプログラムで操作可能
・ 自動制御モードとマニュアルモードの切り替え可能
・ オプションでカメラやレーザレンジセンサ等の外界センサ、大容量バッテリシステム、などを搭載可
オプション例
自動運転ソフトウェアプラットフォームIZAC(アイザック)
IZAC(アイザック)とは、自動運転用のソフトウェアプラットフォームです。IZAC(アイザック)を搭載したコンピューター(PC)へセンサーを接続し、認識させることで、IZACの制御コンポーネントを通じて判断を行い、制御することであらゆる機械をコントロールすることが可能です。IZACで開発された制御コンポーネントを利用することで効率的に自動運転走行や認識アルゴリズムの開発が行えます。

IZAC
自動運転・ADAS開発プラットフォーム用コンピューターIZAC
360°全周囲計測 Surround RoboVision(サラウンドロボビジョン)
オプションシステムとして、最大10個のカメラを用いたRoboVision3 サラウンドビューで全周囲センシングや物体検出機能の他、制御コントローラーの冗長性向上、さらに緊急ブレーキシステムの搭載など、自動運転技術の商業化を見据え、開発プラットフォームとしてセンシング機能や安全面の強化にむけたカスタマイズの対応も可能です。
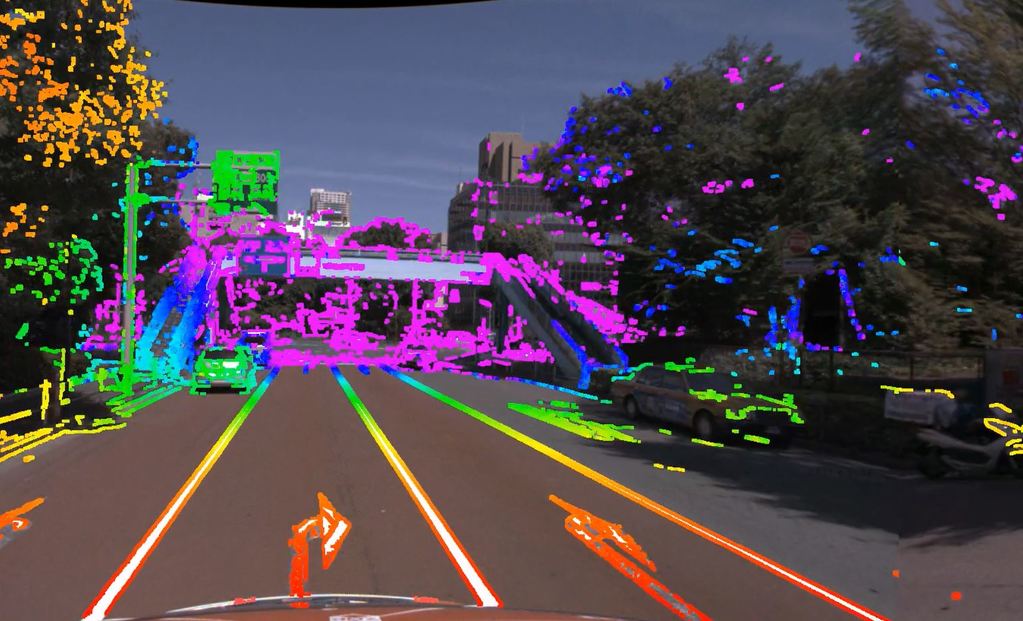
Surround RoboVision
(サラウンドロボビジョン)
自動運転向けの周辺モニタリングセンサとして、360°全周囲を高感度に撮影可能
使用用途
・グローバルに対応した車種の自動運転を活用した製品開発に
・高齢者の移動手段、近距離移動車両の研究開発に
・自動運転車両を用いたモビリティーサービスの車両に
・自社製品・技術の実車での評価に
・クルマとITを連携させたサービスやアプリケーションの実験に
・高齢者の移動手段、近距離移動車両の研究開発に
・自動運転車両を用いたモビリティーサービスの車両に
・自社製品・技術の実車での評価に
・クルマとITを連携させたサービスやアプリケーションの実験に
価格
RoboCar® SUV 2200万円(税別)
製品のお問い合わせ・情報はこちら






© ZMP INC. All Rights Reserved.