

超高感度ステレオカメラシステム RoboVision2sの機能
ステレオビジョンRoboVision2sの主な機能
ZMPではハードウェアからソフトウェアまで一貫して設計・製造を行っています。付属のアプリケーションの機能により、カメラで撮影した写真(画像)から特定の物体までの距離を短い時間(高フレームレート)で計測。
ステレオカメラの画像処理による視差情報で立体(3D)での距離認識をするため、空間内で物体の検知、追跡も画像処理ソフトによりリアルタイムかつ高精度で可能にします。
下記では、ハードウェア、ソフトウェア、画像処理アプリケーションについてステレオカメラユニットRoboVision2sの機能について紹介いたします。
ステレオカメラの画像処理による視差情報で立体(3D)での距離認識をするため、空間内で物体の検知、追跡も画像処理ソフトによりリアルタイムかつ高精度で可能にします。
下記では、ハードウェア、ソフトウェア、画像処理アプリケーションについてステレオカメラユニットRoboVision2sの機能について紹介いたします。
ハードウェア
ZMPでは、RoboVision2sを基板から自社で設計、RoboVision2からRoboVision2sへの変更においては、光学系の部品を改良、レンズの性能が向上、光学ローパスフィルターを追加。
レンズの改良によって周辺の解像度アップが実現し、光学ローパスフィルター追加によりモアレや偽色の影響を低減しております。
本製品を用いることで、距離計測をした際の計測距離の値の変化のばらつきを低減し、スムーズな測距結果が取得可能になりました。
レンズの改良によって周辺の解像度アップが実現し、光学ローパスフィルター追加によりモアレや偽色の影響を低減しております。
本製品を用いることで、距離計測をした際の計測距離の値の変化のばらつきを低減し、スムーズな測距結果が取得可能になりました。

図 改良したRoboVision2sのレンズ
ソフトウェア
キャリブレーション
独自のキャリブレーション手法を開発、キャリブレーションボードで計測した画像を座標変換し、正面から見た画像に変換し、エッジを抽出することでチェッカーボードのエッジ検出精度を向上。これにより出荷時の出荷検査にて、20m±1%精度の距離計測結果を確認し出荷しております。
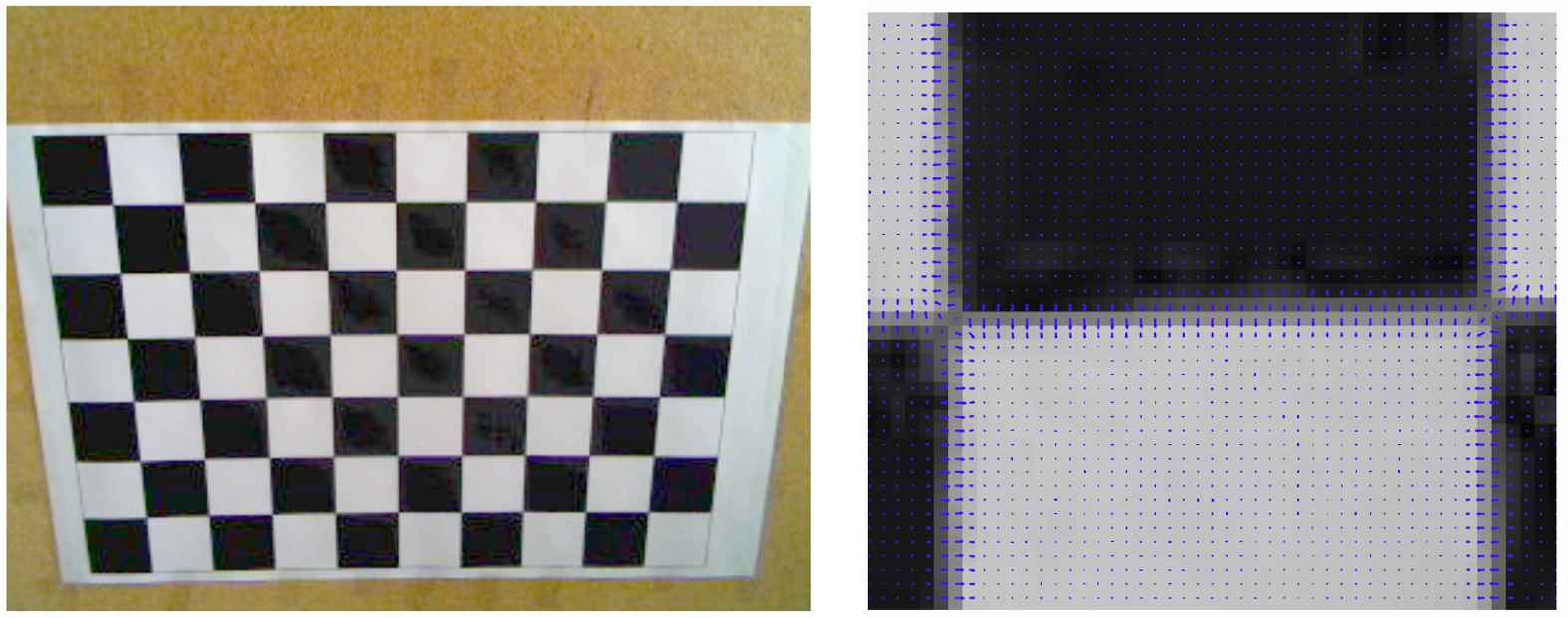
図 左:撮影チェッカーボード 右:認識結果
画像処理アプリケーション
計測画像と点群データ(ポイントクラウドデータ)出力
付属のアプリケーションにより、簡単な画像の計測や距離計測結果、また点群データを(.pcdファイル)を出力します。購入後にPCにカメラを接続し、容易に画像データや距離計測結果活用した開発や研究が行えます。

図 計測画像

図 距離計測結果

図 ポイントクラウドデータ
点群(マッチングデータ)による物体検出
視差および距離計測データから3次元的に点群情報を取得、物体の有無、その位置および幅・高さ(サイズ)を出力します。
また、前方路面(平面)上の物体を検出して、検出した結果は塊(物体・障害物)ごとに位置・高さ・幅等の情報を上から見下ろした2Dマップ上に出力。
占有グリッドマップ(OGM: Occupancy Grid Map)を改良した弊社独自のROGM(Redundant Occupancy Grid Map)により、下図のようなオーバーラップした歩行者も安定して検出可能です。
※本ソフトウェアはオプションソフトとして販売しております。
また、前方路面(平面)上の物体を検出して、検出した結果は塊(物体・障害物)ごとに位置・高さ・幅等の情報を上から見下ろした2Dマップ上に出力。
占有グリッドマップ(OGM: Occupancy Grid Map)を改良した弊社独自のROGM(Redundant Occupancy Grid Map)により、下図のようなオーバーラップした歩行者も安定して検出可能です。
※本ソフトウェアはオプションソフトとして販売しております。
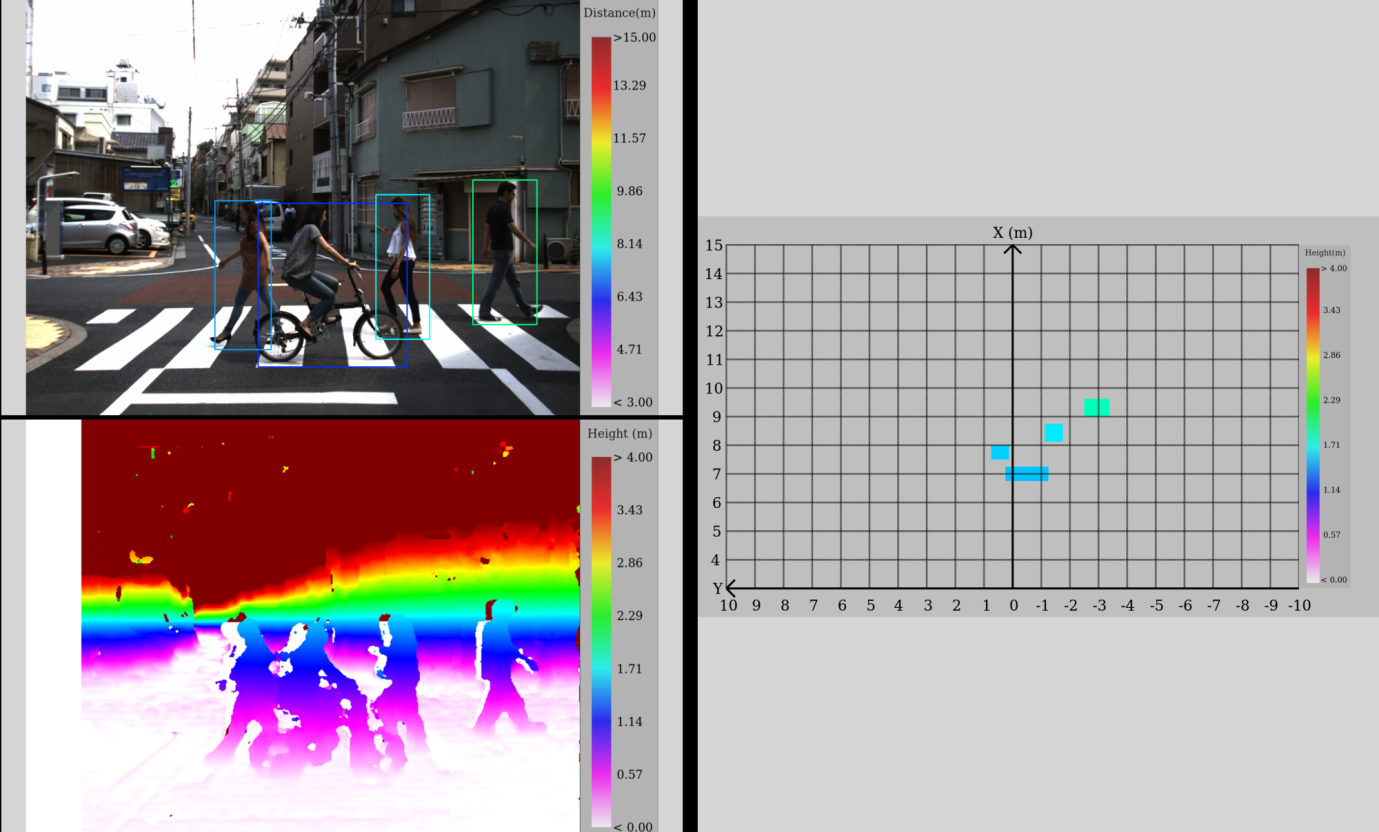
図 物体検出アプリケーションGUI
図 RoboVision2s CarTrackパッケージ GUI

製品のお問い合わせ・カタログダウンロードはこちら






© ZMP INC. All Rights Reserved.