

無人フォークリフトCarriRo Forkの導入フロー
物流無人化を実現する無人搬送ロボットの無人フォークリフトCarriRo Forkの紹介動画や導入事例や導入イメージについて紹介します。
CarriRo Fork導入の3つのステップ
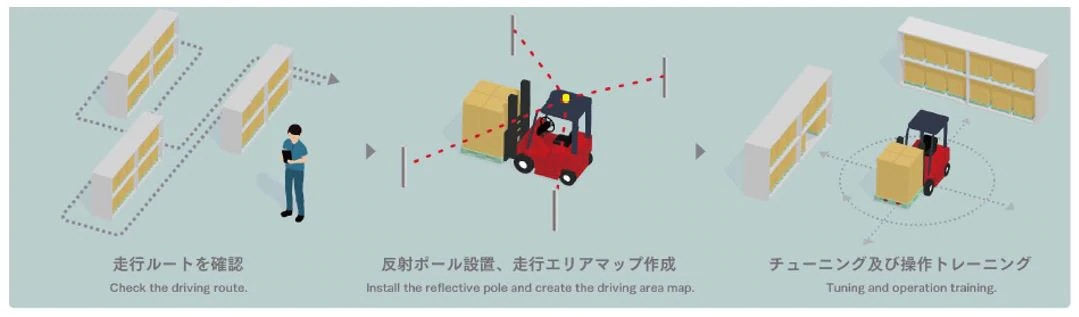
STEP 1.走行ルートを確認
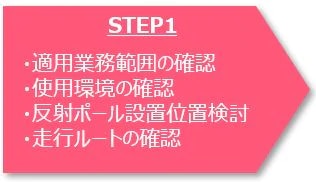
最初のSTEPでは導入にむけ、お客様の現場のヒアリングおよび現地確認、導入イメージのヒアリングを行います。
適用業務範囲や使用環境の確認、また走行エリアにおける反射板の位置、ルートの確認を行います。
適用業務範囲や使用環境の確認、また走行エリアにおける反射板の位置、ルートの確認を行います。
STEP 2.反射ポール設置、走行エリアマップ作製
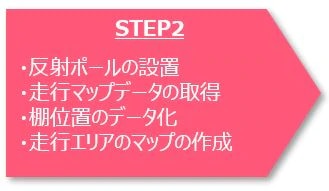
STEP1の情報を元に、使用現場にて反射ポールの設置や反射ポール設置後にフォークリフトを該当エリアにて操作し走行マップデータの取得を行います。
走行マップデータの取得後、荷物を移動する棚や荷下ろし位置を記録します。
走行マップデータとフォークの作業位置を確定しマップ作製が完了します。
走行マップデータの取得後、荷物を移動する棚や荷下ろし位置を記録します。
走行マップデータとフォークの作業位置を確定しマップ作製が完了します。
STEP 3.チューニングおよび操作トレーニング
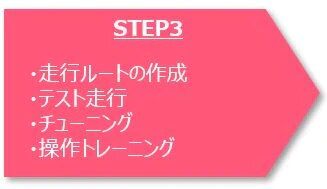
STEP3では前回までに作成した走行エリアのマップを活用し、走行ルートの作成を行います。
走行ルートは、走行開始位置と目的地をしているすることでソフト内で走行経路を自動的に生成してくれます。
走行ルートの作成後、テスト走行や細かいチューニングを行い、現場作業者への操作トレーニングを実施し、現場運用を行う流れとなります。
走行ルートは、走行開始位置と目的地をしているすることでソフト内で走行経路を自動的に生成してくれます。
走行ルートの作成後、テスト走行や細かいチューニングを行い、現場作業者への操作トレーニングを実施し、現場運用を行う流れとなります。
カタログダウンロード
メールでお問い合わせ







© ZMP INC. All Rights Reserved.