
CarriRo(キャリロ)とは
CarriRo(キャリロ)は「搬送作業をより楽しく、快適に」することをコンセプトに開発された物流支援ロボットです。
自動運転事業で培った画像認識技術を応用した自律移動モード(無人搬送)をメイン機能としつつ、モデルによりジョイスティックによる操作ができるドライブモード、ビーコン(発信機)を自動追従するカルガモモードがあり幅広い用途や場所で活用できます。現在、300社以上の拠点に導入し、工場、倉庫、ホテル・旅館・空港での活用が進んでいます。
自動運転事業で培った画像認識技術を応用した自律移動モード(無人搬送)をメイン機能としつつ、モデルによりジョイスティックによる操作ができるドライブモード、ビーコン(発信機)を自動追従するカルガモモードがあり幅広い用途や場所で活用できます。現在、300社以上の拠点に導入し、工場、倉庫、ホテル・旅館・空港での活用が進んでいます。




自動追従・画像認識技術・自律移動モードにより、
幅広い用途や場所で活用できます
幅広い用途や場所で活用できます


CarriRo ADの重量版モデル
これまでの2倍以上の可搬重量を実現
これまでの2倍以上の可搬重量を実現


フォークリフトで移動していたパレットを
自動で搬送することが可能
自動で搬送することが可能


最大1000kgのパレットを積載可能な
CarriRoの超重量モデル
CarriRoの超重量モデル


場の運用やニーズに合わせて、
オプションを自由に選ぶことのできる製品
オプションを自由に選ぶことのできる製品


CarriRoには、3つの主な特徴があります。それはドライブモード、カルガモモード、自律移動モードです。
これらにより、物流・製造の現場での負荷軽減・効率化はもとより、劇的な省人化・省人化を実現します。
これらにより、物流・製造の現場での負荷軽減・効率化はもとより、劇的な省人化・省人化を実現します。

自律移動モードの事例動画
無人で運搬ができます。
路面に貼られたランドマークを識別しながら、自動で移動し、荷物を搬送させることができます。
路面に貼られたランドマークを識別しながら、自動で移動し、荷物を搬送させることができます。
カルガモモードの事例動画
複数台分の運搬ができます。
CarriRo はビーコンに反応し、作業者や親機となるCarriRo に追従することができます。作業者の負担なく一度に数台荷物を運ぶことができます。
CarriRo はビーコンに反応し、作業者や親機となるCarriRo に追従することができます。作業者の負担なく一度に数台荷物を運ぶことができます。

ジョイスティック
作業負荷をゼロにします。
ジョイスティックを操作すると、CarriRo が前後左右に走行し、ほとんど力を使うことなく荷物を運ぶことができます。
ジョイスティックを操作すると、CarriRo が前後左右に走行し、ほとんど力を使うことなく荷物を運ぶことができます。


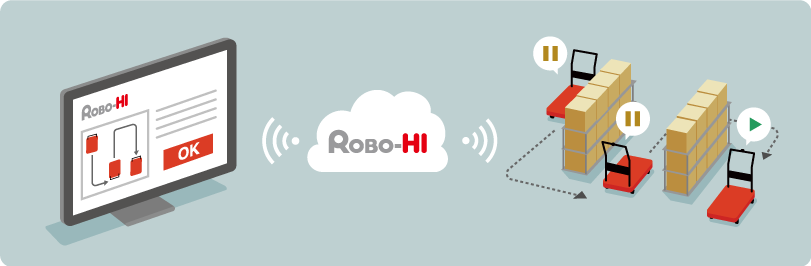
既存の設備や外部機器、システムとつながることで、様々なソリューションが実現します。
ロボット管理プラットフォーム「ROBO-HI(ロボハイ)」の活用、または外部機器連携モデルを選んでいただく事でロボット、エレベーターなどの設備、各種業務システムと連携し、人手を介することのないロボット運用が可能となります。
連携事例
株式会社サンゲツ 様
・CarriRo 複数台制御
・エレベーター連携
・防火シャッター連携
カリツー株式会社 様
・遠隔操作
ソフトバンク株式会社 様
・IFタグリーダー
株式会社ライジング 様
・CarriRo複数台制御
・生産管理システム
・自動ドア
・リフター


CarriRoに付属する様々なオプション製品によって、使用目的にあったカスタマイズが可能です。

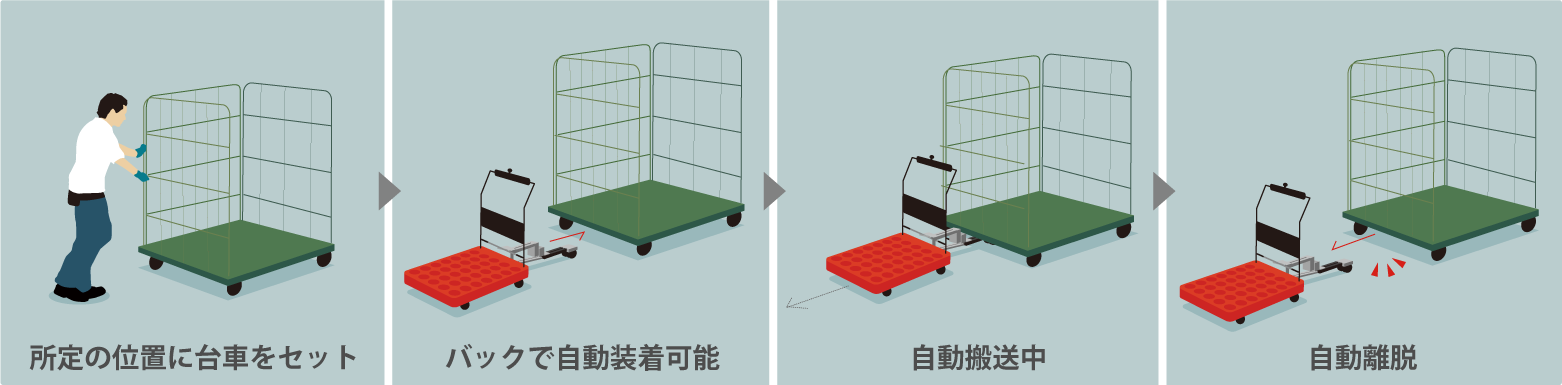
カゴ台車や六輪台車などの台車を自動で連結し、目的地まで搬送、離脱の一連の動作を完全に自動で行うことが可能になります。

タブレットの専用アプリで、CarriRo の音声
や障害物センサーの検知範囲等の詳細設定、セルフメンテナンスの機能を備えています。さらに、自律移動モード時には可変ランドマークのルート設定ができます。
や障害物センサーの検知範囲等の詳細設定、セルフメンテナンスの機能を備えています。さらに、自律移動モード時には可変ランドマークのルート設定ができます。


カゴ台車、スリムカートやハンドリフト等の牽引が可能になります。簡単に脱着でき、お使いの台車に応じて柔軟に対応が可能です。アタッチメントも提供しており、複数台搬送も可能です。


CarriRo の走行と連動して光ることにより、周囲への注意喚起が可能です。走行中はサウンドも流れますが、光とあわせて使用することで、より安全に運用できます。
パレット搬送モデル専用のオプションでパレット等、搬送物を載せる台車となります。自動着脱が可能です。


| AD | Basic | AD+ 1T | AD+ (台車版) | AD+ (パレット版) | |
| 重量(約) | 55 kg | 45 kg | 86 kg | 56kg(ウエイトを除く) | 60 kg |
| 外寸 (約) | 幅(W)65cm | 幅(W)64.5cm | 幅(W)65cm | ||
|
奥行93cm (ハンドル部含む101cm) |
奥行92.5cm (ハンドル部含む101cm) |
奥行93cm (パレット台車連結時135cm) |
|||
| 荷台高さ24cm |
荷台高さ24cm (パレット台車連結時35cm) |
荷台高さ29cm (パレット台車連結時35cm) |
|||
| 高さジョイスティック先端まで96cm | ー | ||||
| 作動温度 | 0℃~40℃ | ||||
| 追従センサー |
光学式、最大検出距離5m |
ー | 光学式、最大検出距離5m | ||
| 障害物センサー |
レーザーセンサー、接触センサー |
LRFセンサー、接触センサー | |||
| 最大積載荷重 | 150kg ※ | 200kg ※1 | 荷台積載不可 | 200kg ※1 | 荷台積載不可 |
| 牽引力 | 250N 300kg ※2 | 600kg相当 ※2 | 1000kg相当 ※2 | 600kg相当 ※2 | |
| 最大速度 | 追従モード:6km/h 自律モード:3km/h |
3km/h | |||
| 登板角度 | 4 °※3 | ー | |||
| バッテリー | リチウムイオン電池 | ||||
| 充電時間 | 約2時間30分 | ||||
| 稼働時間 | 8時間(連続稼働時) | ||||
| 充電方法 | 専用電器使用AC100-240V8.5A | 専用電器使用AC100-200V970VA | 専用電器使用AC100-240V8.5A | ||
| ナビゲーション式 | CarriRo Visual Tracking | ||||
| 音声言語 | 日本語、英語、中国語 | ||||
※1平坦路のみ ※2牽引車重量(積載物含む) ※3牽引時除く
路面状況及び牽引台車の重量や車輪の抵抗等により、変わる可能性があります。
ADモデルは、牽引重量が150kgを超える時は、CarriRo荷台に40kg荷重が必要となります。
本製品仕様は、弊社評価基準に基づくものとなっております。また性能改善のため予告なく変更の場合がございます。
路面状況及び牽引台車の重量や車輪の抵抗等により、変わる可能性があります。
ADモデルは、牽引重量が150kgを超える時は、CarriRo荷台に40kg荷重が必要となります。
本製品仕様は、弊社評価基準に基づくものとなっております。また性能改善のため予告なく変更の場合がございます。
価格
価格につきましては、お気軽にお問い合わせください。






© ZMP INC. All Rights Reserved.