

ADAS(先進運転支援システム)とAD(自動運転)について
ADAS(先進運転支援システム)は、AD(自動運転)の大きな概念の一部となります。
自動運転はその自動化の程度により5つのレベルに分類されており、
レベル1〜2は「運転支援」と位置付けられ、システムが判断するいわゆる「自動運転」はレベル3以上となっています。
ADASとは、あくまで「運転支援機能」であり、ヒトが自動車を運転する際に、
いかに事故を回避し、快適に目的地にたどり着くようにできるかを支援する機能を指します。
あくまで主体はドライバーであるヒトであり、それをサポートする機能と言えます。
それに対して自動運転が目指す先は、もはやヒトの関与なしに自動車が搭載するAI(人工知能)が判断し、
目的地にたどり着く、という発想です。
■本ページではADASとADの違いや共通点等について、自動運転のレベルや技術的視点などから解説します。
さらにZMPのADAS、ADに対しての取り組みについても説明します。
自動運転はその自動化の程度により5つのレベルに分類されており、
レベル1〜2は「運転支援」と位置付けられ、システムが判断するいわゆる「自動運転」はレベル3以上となっています。
ADASとは、あくまで「運転支援機能」であり、ヒトが自動車を運転する際に、
いかに事故を回避し、快適に目的地にたどり着くようにできるかを支援する機能を指します。
あくまで主体はドライバーであるヒトであり、それをサポートする機能と言えます。
それに対して自動運転が目指す先は、もはやヒトの関与なしに自動車が搭載するAI(人工知能)が判断し、
目的地にたどり着く、という発想です。
■本ページではADASとADの違いや共通点等について、自動運転のレベルや技術的視点などから解説します。
さらにZMPのADAS、ADに対しての取り組みについても説明します。
自動運転を活用した新たなソリューションサービス

1. 自動運転のレベルについて
自動運転はレベルという概念で自動化の程度を分類しています。
分類方式は、2016年に米国運輸省NHTSAが発表したSAE(Society of Automotive Engineers)の定義に基づいています。

出展:平成28年12月7日 内閣官房IT総合戦略室 自動運転レベルの定義を巡る動きと今後の対応(案)より
レベル0:運転自動化なし
全ての運転タスク (DDT: Dynamic Driving Task)は、運転者によって実施されています。
自動化要素を全く含んでいない、という概念です。(予防安全システムによって支援されている場合を含む)
レベル1:運転者支援
・運転自動化システムによる、持続的かつ運行設計領域(ODD:Operational Design Domain)の限定的な実施。
・運転化自動システムは、前後・左右方向のいずれかの車両制御に係る運転タスク(DDT)のサブタスクを実施。(両方ではない)
・運転者は、運転タスク(DDT)の残りの部分を実施することを期待。
レベル2:部分的運転自動化
・運転自動化システムによる、持続的かつ運行設計領域(ODD)限定的な実施。
・運転自動化システムは、前後・左右方向の両方の車両制御に係る運転タスク(DDT)のサブタスクを実施。
・運転者は、対象物・事象検知・反応(OEDR:Object and Event Detection and Response)のサブタスクを完成させ、
運転タスク(DDT)の残りの部分を監視することを期待。
レベル3:条件付運転自動化
・自動運転システム(ADS)による、全ての運転タスク(DDT)に係る持続的かつ運行設計領域(ODD)限定的な実施。
・予備対応時利用者(DDT fallback-ready user)は、自動運転システム(ADS)の発する介入要求や、
他の車両システムでの運転タスク(DDT)実施関連のシステム故障に対して適切に応答することを期待。
レベル4:高度運転自動化
・自動運転システム(ADS)による、全ての運転タスク(DDT)に係る持続的かつ運行設計領域(ODD)限定的な実施。
・フォールバック(DDT fallback)において、利用者が介入すべく応答することは期待されない。
レベル5:完全運転自動化
・自動運転システム(ADS)による、全ての運転タスク(DDT)に係る持続的かつ無条件
(すなわち運行設計領域(ODD)限定的でない)の実施。
・フォールバック(DDT fallback)において、利用者が介入すべく応答することは期待されない。
(出典:国土交通省 http://www.kantei.go.jp/jp/singi/it2/senmon_bunka/detakatsuyokiban/dorokotsu_dai1/siryou3.pdf)
2. 自動運転におけるADASの位置付け
ADASは一般的に自動運転のレベル2に位置付けられます。これは意思決定の主体が運転者にあることを意味しています。 すなわち事故が発生した時の責任の所在がドライバー、つまりヒトにあるということです。
最近では、レベル3実現に向けた車両の販売も開始されており、ホンダでは、レジェンドに高速道路での自動運転機能を搭載したモデルを搭載して販売を行う予定もあります。
レベル3の自動運転においては、自動運転走行中については自動車が事故の責任を負い、走行中はドライバーの運転操作から解放されます。レベル3では、車両が自動運転走行の継続が不可能な際には、速やかにドライバーが運転を引き継がなければなりませんが、高速道路の渋滞中の追従走行など様々なところで活躍が見込まれると感じています。
(参照:時事ドットコムニュース
ホンダ、日本初「レベル3」 来夏、高速渋滞時に自動化 https://www.jiji.com/jc/article?k=2019121600906&g=eco)
3. ADASと自動運転の共通点
ADAS(高度運転支援システム)とAD(自動運転)は、外界の情報を察知する車載カメラやレーダなどの各種センサや、センサで計測したデータから有用な情報を抽出したり、自動車の制御の判断などをするECU、ステアリングや、アクセル、ブレーキなど、自動車の駆動部分を制御する装置など、共通する技術が多くあります。ADAS開発は、そのままADの開発にも繋がります。
ADASの開発を進める際のイメージは、「事故が起こり得る原因を取り取り除く」若しくは「被害をなくすか最小限に留める」ために対策を行うというものです。一方、自動運転は、無人でシステムが運転することが前提ですので、ヒトが運転する以上の安全基準をクリアする必要があります。自動運転が可能な程の高機能の制御機器を搭載しているということは、ヒトが運転する際に機能するADASも非常に高水準なものになるといえます。
ADASの開発を進める際のイメージは、「事故が起こり得る原因を取り取り除く」若しくは「被害をなくすか最小限に留める」ために対策を行うというものです。一方、自動運転は、無人でシステムが運転することが前提ですので、ヒトが運転する以上の安全基準をクリアする必要があります。自動運転が可能な程の高機能の制御機器を搭載しているということは、ヒトが運転する際に機能するADASも非常に高水準なものになるといえます。
4. ADASと自動運転の違い
ADASと自動運転の根本的な違いは、運転に対する責任の所在です。
自動運転のレベル1~レベル5のうち、レベル2まではヒトに責任の所在があり、ADASといえます。
レベル3では、作動継続が出来ない場合、運転者が対応し主体になりますが、基本的にシステムに主体があり、自動運転となります。
レベル2、レベル3はどちらも、アクセル、ブレーキ、ステアリングなど、自動車の運転操作をシステムが行う場合があります。
しかし、レベル2は運転の主体はドライバーで、レベル3になると、ヒトの対応条件によりますが、システムが自動車を制御中の場合、運転の主体はシステムとなります。
そして、レベル4以上では、運転は完全にシステムが運転の主体になります。
ヒトに責任がある場合は、これまでの運転と同様ですが、レベル3~5のシステム主体下で事故が起こった場合、現状ではシステムの責任を誰がどのようにとるのか明確ではありません。
日本では、自動車事故が発生した場合の責任の所在は、刑事・民事・行政の視点から考えることになりますが、現状の制度や法律は人間が運転することを前提にしており、ドライバーのいない自動運転には対応できていません。
今後、自動運転を本格的に実用化、普及させるには法的枠組みの整備が必要となります。
例えば、自動運転時に発生した事故の保険の支払いを考えてみましょう。
事故が自動車メーカーの過失により起こった場合、保険会社がそのメーカーに賠償請求を行なうことが予想されます。
このように各方面で、自動運転実用化や法整備の議論は、積極的に行われています。
自動運転のレベル1~レベル5のうち、レベル2まではヒトに責任の所在があり、ADASといえます。
レベル3では、作動継続が出来ない場合、運転者が対応し主体になりますが、基本的にシステムに主体があり、自動運転となります。
レベル2、レベル3はどちらも、アクセル、ブレーキ、ステアリングなど、自動車の運転操作をシステムが行う場合があります。
しかし、レベル2は運転の主体はドライバーで、レベル3になると、ヒトの対応条件によりますが、システムが自動車を制御中の場合、運転の主体はシステムとなります。
そして、レベル4以上では、運転は完全にシステムが運転の主体になります。
ヒトに責任がある場合は、これまでの運転と同様ですが、レベル3~5のシステム主体下で事故が起こった場合、現状ではシステムの責任を誰がどのようにとるのか明確ではありません。
日本では、自動車事故が発生した場合の責任の所在は、刑事・民事・行政の視点から考えることになりますが、現状の制度や法律は人間が運転することを前提にしており、ドライバーのいない自動運転には対応できていません。
今後、自動運転を本格的に実用化、普及させるには法的枠組みの整備が必要となります。
例えば、自動運転時に発生した事故の保険の支払いを考えてみましょう。
事故が自動車メーカーの過失により起こった場合、保険会社がそのメーカーに賠償請求を行なうことが予想されます。
このように各方面で、自動運転実用化や法整備の議論は、積極的に行われています。
5. ADASのHMI(ヒューマンマシンインタフェース)
ADASとAD(自動運転)とのもう一つの違いは、自動運転がシステムのみで運転するのに対して、ADASでは、運転にヒトとシステムが関与しているため、両者の橋渡しが必要になるところです。
ヒトとシステムが共同で自動車を操作するので、両者が円滑にコミュニケーションをとる必要があります。そこでADASの設計時に留意するポイントが、ヒューマンマシンインタフェース(HMI: Human machine interface)の発想です。これは人間と機械がお互いの意思や情報を伝達するプロトコルとも言えます。
ヒトが車へ指令伝達をする場合は、ヒトの運転操作そのものを、車が検出します。
逆に、車からヒトに対しての伝達はモニターへの表示である視覚、警告音を鳴らす聴覚、ステアリングを振動させるなどの触覚など
五感を介して行います。システムから伝達される情報をヒトが正確に認識するには、インタフェースの設計が重要になります。
ADASシステムからドライバーに伝達される情報は、3種類のレベル(情報供給、注意喚起、警報)に分類されます。
早い段階で、ドライバーが直接確認できない情報を、システムが伝達するケースでは、
正確に意図を伝えないと、ドライバーの誤解を招き、危険です。
もし視聴覚表示を適切な形で決めなければ、意図を誤って操作が遅れる等のリスクがあります。
例えば、時間的猶予のない状況では目視する時間に限りがあるため、信号音により直ちに情報を通知し、瞬時に運転行動を起こさせなければなりません。この様に、状況に応じて適切に伝わる伝達形式を採用するように努めます。
また、運転に対しての習熟度が低く、ADAS機能に関して充分な予備知識のないドライバーでも、適切に行動に移せるインターフェースのデザインが求められます。ヒューマンマシンインタフェース(HMI)をデザインする際は、特に高齢者や運転初心者に対してなど、ドライバーの年齢や運転への習熟度も考慮することが必要となります。
ヒトとシステムが共同で自動車を操作するので、両者が円滑にコミュニケーションをとる必要があります。そこでADASの設計時に留意するポイントが、ヒューマンマシンインタフェース(HMI: Human machine interface)の発想です。これは人間と機械がお互いの意思や情報を伝達するプロトコルとも言えます。
ヒトが車へ指令伝達をする場合は、ヒトの運転操作そのものを、車が検出します。
逆に、車からヒトに対しての伝達はモニターへの表示である視覚、警告音を鳴らす聴覚、ステアリングを振動させるなどの触覚など
五感を介して行います。システムから伝達される情報をヒトが正確に認識するには、インタフェースの設計が重要になります。
ADASシステムからドライバーに伝達される情報は、3種類のレベル(情報供給、注意喚起、警報)に分類されます。
早い段階で、ドライバーが直接確認できない情報を、システムが伝達するケースでは、
正確に意図を伝えないと、ドライバーの誤解を招き、危険です。
もし視聴覚表示を適切な形で決めなければ、意図を誤って操作が遅れる等のリスクがあります。
例えば、時間的猶予のない状況では目視する時間に限りがあるため、信号音により直ちに情報を通知し、瞬時に運転行動を起こさせなければなりません。この様に、状況に応じて適切に伝わる伝達形式を採用するように努めます。
また、運転に対しての習熟度が低く、ADAS機能に関して充分な予備知識のないドライバーでも、適切に行動に移せるインターフェースのデザインが求められます。ヒューマンマシンインタフェース(HMI)をデザインする際は、特に高齢者や運転初心者に対してなど、ドライバーの年齢や運転への習熟度も考慮することが必要となります。
6. 高度道路交通システムにおけるADASと自動運転
情報通信技術等を駆使してヒト、車両、交通インフラを快適・安全で輸送効率の高い一括りのシステムとして構築を試みる高度道路交通システム(ITS: Intelligent Transport Systems)ですが、自動運転とADASもその進展に大きな役割を果たしています。
自動車の誕生と量産化は移動に大きな革命をもたらしましたが、それ以来、数世紀の間変わらなかった、ヒトが運転するという根本的な仕組みが、この10数年で劇的に変化すると予測されています。近年のIT化、IOTの浸透、ネットワーク化、AI(人工知能)のディープラーニング(深層学習)、アルゴリズム等の目覚ましい進化に伴い、自動運転のシステム化が急速に進んでいます。
つまり、自動車の運転は、ヒトからADASへ、そしてADASの発展した先にある自動運転へと取ってかわります。
体調の良し悪し、老化、勘違いや集中力の散漫といった生身の人間では避けては通れない運転者のコンディション変化に伴う自動車の運転の危険度の変化は、ADASや自動運転の進化により安定化します。ADASや自動運転技術が高度化するにつれて、車移動はより快適になり、事故のリスクも低減され、道路交通は、より安全なものになります。
また、交通事故の減少だけではなく、効率的な走行により、渋滞や環境負荷を低減させ、道路交通社会の課題解決に大きく寄与することが見込まれています。自動運転が実用段階に突入すると、従来は運転に時間と労力を割かれていたヒトが作業から解放され余暇が生まれ、産業構造にも劇的な変化がもたらされます。
自動運転やADASの技術は、それに伴い生成される交通データ等のデータ基盤により、さらに進歩が進み、自動運転システムはデータ駆動型になり、コネクテッドカーに象徴されるようにインターネットとの融合が進み、AI(人工知能)やソフトウェア技術のウェイトが増しています。
その進展のために必要不可欠なプラットフォームとして、走行映像データベース、ダイナミック・マップ等の膨大なデータを処理すべく、クラウド・サービスの活用も重視されるでしょう。
フォルクスワーゲン、トヨタ、ルノー、日産、三菱、ゼネラル・モーターズ、ホンダ、プジョー・シトロエン、ダイムラー、マツダ、スバル、ダイハツ、スズキ等、各車メーカーは、多くの投資をして、元来の走行技術や車両製造技術の上に、ADASや自動運転に代表される新しいテクノロジーの動向をいかに捉え導入し、消費者に対する付加価値を高め競争力を維持・強化するかに心血を注いでいます。
自動車の誕生と量産化は移動に大きな革命をもたらしましたが、それ以来、数世紀の間変わらなかった、ヒトが運転するという根本的な仕組みが、この10数年で劇的に変化すると予測されています。近年のIT化、IOTの浸透、ネットワーク化、AI(人工知能)のディープラーニング(深層学習)、アルゴリズム等の目覚ましい進化に伴い、自動運転のシステム化が急速に進んでいます。
つまり、自動車の運転は、ヒトからADASへ、そしてADASの発展した先にある自動運転へと取ってかわります。
体調の良し悪し、老化、勘違いや集中力の散漫といった生身の人間では避けては通れない運転者のコンディション変化に伴う自動車の運転の危険度の変化は、ADASや自動運転の進化により安定化します。ADASや自動運転技術が高度化するにつれて、車移動はより快適になり、事故のリスクも低減され、道路交通は、より安全なものになります。
また、交通事故の減少だけではなく、効率的な走行により、渋滞や環境負荷を低減させ、道路交通社会の課題解決に大きく寄与することが見込まれています。自動運転が実用段階に突入すると、従来は運転に時間と労力を割かれていたヒトが作業から解放され余暇が生まれ、産業構造にも劇的な変化がもたらされます。
自動運転やADASの技術は、それに伴い生成される交通データ等のデータ基盤により、さらに進歩が進み、自動運転システムはデータ駆動型になり、コネクテッドカーに象徴されるようにインターネットとの融合が進み、AI(人工知能)やソフトウェア技術のウェイトが増しています。
その進展のために必要不可欠なプラットフォームとして、走行映像データベース、ダイナミック・マップ等の膨大なデータを処理すべく、クラウド・サービスの活用も重視されるでしょう。
フォルクスワーゲン、トヨタ、ルノー、日産、三菱、ゼネラル・モーターズ、ホンダ、プジョー・シトロエン、ダイムラー、マツダ、スバル、ダイハツ、スズキ等、各車メーカーは、多くの投資をして、元来の走行技術や車両製造技術の上に、ADASや自動運転に代表される新しいテクノロジーの動向をいかに捉え導入し、消費者に対する付加価値を高め競争力を維持・強化するかに心血を注いでいます。
7. ZMPのADAS、ADとの関わり
ZMPは自動車だけでなく、様々な「動くもの」の自動化に取り組んでいます。
対象は一般の自動車だけでなく、自律移動が求められる、タクシー、物流ロボット、宅配ロボット、ドローンなどの自動化も進めています。
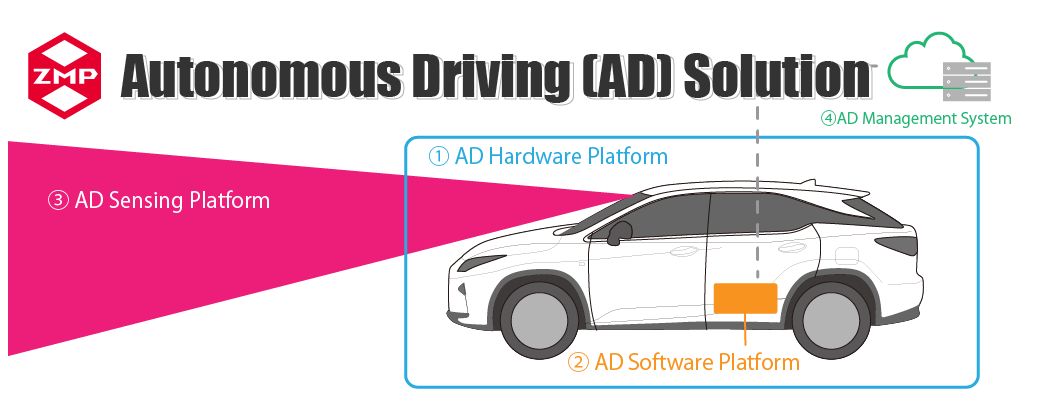
ADAS(高度運転支援システム)、AD(自動運転)には認知・判断・操作という3つのステップを踏みますが、
その中で認知をつかさどる「目」と判断をつかさどる「頭脳」を自社開発しています。
ADAS,ADともに外界情報を入手するために重要な目となるステレオカメラは、高感度CMOSイメージャーを使用し、
同期・平行化・歪み補正などの前処理から、視差からの距離検出、オブジェクト検出などまで、自社開発を進めています。
例えば、同じADAS機能にしても市街地走行と高速道路では、他の交通や歩行者など認識、予測すべき対象が大きく異なります。
ZMPでは市街地公道走行実験を実践し、膨大なデータや経験を積み重ねています。
そして自動運転レベル4を目指した技術開発を進めています。
ADAS対応は当然のこと、ADしかも高度な自動運転を実現できるよう、新しいデバイスやアルゴリズムの開発を進めています。
対象は一般の自動車だけでなく、自律移動が求められる、タクシー、物流ロボット、宅配ロボット、ドローンなどの自動化も進めています。
ADAS(高度運転支援システム)、AD(自動運転)には認知・判断・操作という3つのステップを踏みますが、
その中で認知をつかさどる「目」と判断をつかさどる「頭脳」を自社開発しています。
ADAS,ADともに外界情報を入手するために重要な目となるステレオカメラは、高感度CMOSイメージャーを使用し、
同期・平行化・歪み補正などの前処理から、視差からの距離検出、オブジェクト検出などまで、自社開発を進めています。
例えば、同じADAS機能にしても市街地走行と高速道路では、他の交通や歩行者など認識、予測すべき対象が大きく異なります。
ZMPでは市街地公道走行実験を実践し、膨大なデータや経験を積み重ねています。
そして自動運転レベル4を目指した技術開発を進めています。
ADAS対応は当然のこと、ADしかも高度な自動運転を実現できるよう、新しいデバイスやアルゴリズムの開発を進めています。
8. ZMPの自動運転開発ソリューションの紹介
ZMPでは「将来、自動運転が実用化された社会」を描きながら、レベル4を目指した自動運転技術や、タクシーの配車アプリケーションなどの開発に取り組んでおります。
また、自社の自動運転制御開発を通じたサービスの展開や、技術開発で培った技術を製品に応用し、ADAS/自動運転の開発ツールとして使用いただける技術開発支援を通じたビジネスを行っております。
以下にて、自動運転技術を活用したサービスについてご紹介しております。
また、自社の自動運転制御開発を通じたサービスの展開や、技術開発で培った技術を製品に応用し、ADAS/自動運転の開発ツールとして使用いただける技術開発支援を通じたビジネスを行っております。
以下にて、自動運転技術を活用したサービスについてご紹介しております。

自動運転ソリューション サービス紹介メニュー
自動運転ソリューションに関する各種説明について下記ボタンより詳細をご確認いただけます。



10. お問合わせ、資料請求
上記や製品に関する問合せ、資料請求については下記よりお問い合わせください。


© ZMP INC. All Rights Reserved.