MATLAB/Simulinkによるシミュレーションに対応した 実車1/10スケールロボットカー販売開始
MATLAB/Simulinkによるシミュレーションに対応した
実車1/10スケールロボットカー販売開始
-自動駐車・障害物回避など経路設計をシミュレーションと実機で比較可能-
株式会社ZMP(東京都文京区、代表取締役社長:谷口 恒、以下ZMP)は、本日、MATLAB/Simulinkによるシミュレーションに対応した実車1/10スケールロボットカーの販売を開始しました。
「RoboCar1/10 MATLABコネクション2017」は、200,000円(税別)で本日より販売を開始します。本製品は、実車1/10スケールの自動運転技術開発プラットフォーム「RoboCar 1/10 2016」とMATLAB/Simulinkに対応した最新ソフトウェア「RoboCar 1/10 MATLABコネクション2017」から構成されます。RoboCar 1/10 2016は、周囲環境を把握するセンサを搭載した実車の1/10スケールの自動運転技術開発プラットフォームであり、自動運転や運転支援技術の研究開発、自律移動を題材とした研究・社員研修などでご活用頂いております。今回の「RoboCar1/10 MATLABコネクション2017」ではMATLAB/SimulinkとRoboCar 1/10 2016を接続するためのライブラリと、経路設計するための車両モデルを用意しております。
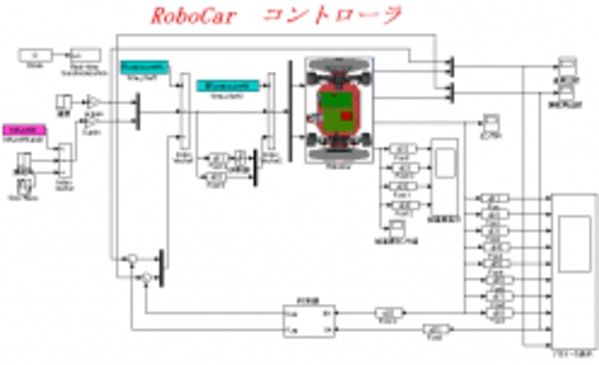
本製品では、MATLAB/SimulinkプログラムからRoboCar 1/10 2016を制御することでMATLAB/Simulink上での経路設計やシミュレーション確認及び実機との比較が可能となります。例えば自動駐車や車線変更、障害物回避などの自動走行の研究開発の場合、目標の位置と向きに従って最適(ハンドル操作がスムーズかつ横Gの少ない)な経路を算出し、車両二輪モデルを用いてMATLAB/Simulinkにより操舵角の推定を行います。この操舵角に基づきMATLAB/Simulink上でのシミュレーションを行うことができ、計画した経路とシミュレーション結果との比較や、その差異に基づく経路制御が可能となります。同じMATLAB/SimulinkプログラムによりRoboCar 1/10の実機の動作が可能なため、シミュレーションおよび実環境でのセンサデータを用いた実験を効率的に行うことが可能となります。
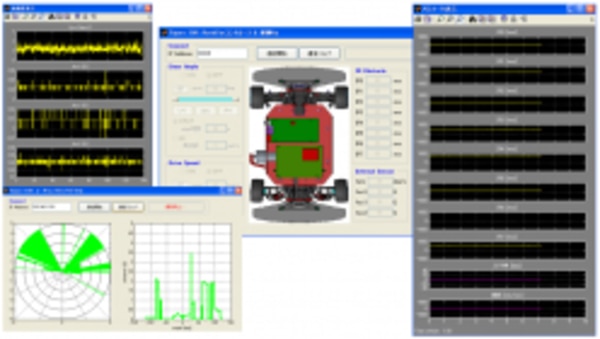
センサ値取得イメージ
Simulinkモデル
RoboCar 1/10 MATLABコネクション2017
http://www.zmp.co.jp/products/robocar-matlab
アプリケーション
・経路設計
任意の位置と向きに向けた経路の算出を行い、車両二輪モデルにより操舵角を推定し、シミュレーションおよび実機の走行ができます。設計経路とシミュレーション結果、RoboCar1/10の軌跡の確認が可能です。
・RoboCarシミュレーション
操舵角、速度の入力値により得られるシミュレーション結果の軌跡と RoboCar 1/10の実際の操舵角、速度による走行の軌跡をグラフ上に重ね合わせて表示します。
・RoboCarコントローラ(1)
RoboCar 1/10 2016をMATLABにてリアルタイム操作可能なアプリケーションです。操舵角と速度の制御および赤外線測距センサによる障害物回避動作が可能です。
・RoboCarコントローラ(2)
「RoboCarコントローラ(1)」の機能に加え、赤外線測距センサ、ジャイロセンサ、加速度センサの計測値をリアルタイムに表示することが可能です。
・レーザレンジセンサ
RoboCarに搭載されたレーザレンジセンサ(オプション)の値を100msで更新・表示します。水平面上での表示に加え、障害物までの距離をグラフ化して表示します。
・軌跡追従デモ
RoboCar1/10を遠隔操作した際の軌跡を記録し、自動走行を行うことができます。
動作環境
PC:OS/Windows 8, Windows 10 ソフトウェア:MATLAB/Simulink 2017
価格
RoboCar 1/10 2016 + MATLABコネクション2017
一般 1,240,000円(税別)/アカデミック 1,120,000円(税別)
(RoboCar 1/10 2016前後LRFオプションとMATLABコネクション2017のセットです)
RoboCar 1/10 MATLABコネクション2017 200,000円(税別)
(すでにRoboCar 1/10 2016をお持ちの方向けのオプションです)
※上記価格にMATLAB/Simulinkは含まれません。
【プレスリリース記事】
プレスリリースPDFはこちらからご確認いただけます。