

自動運転車開発プラットフォームRoboCar MiniVan

RoboCar MiniVanの概観(オプションセンサー付イメージ)
|

概要・特徴
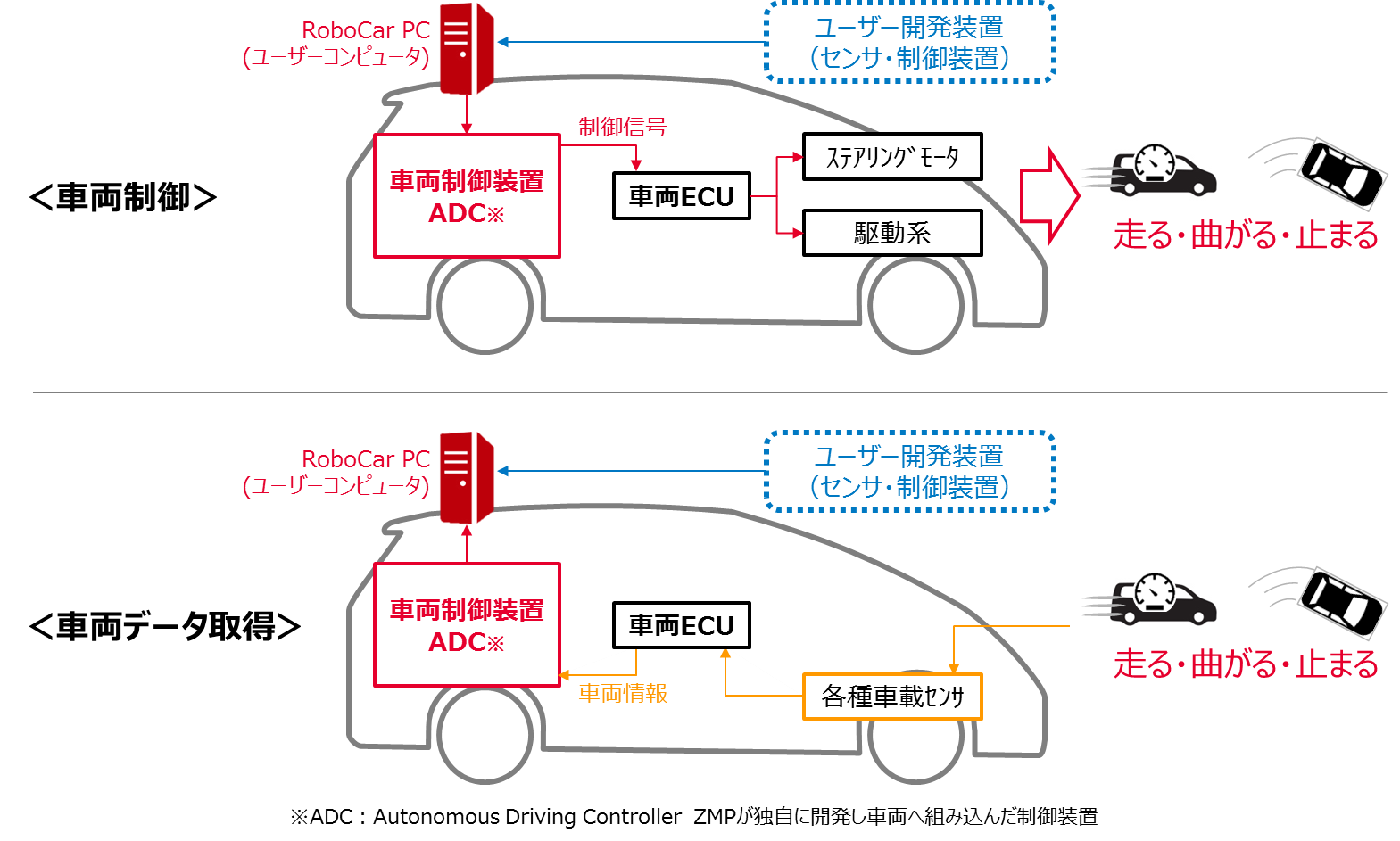
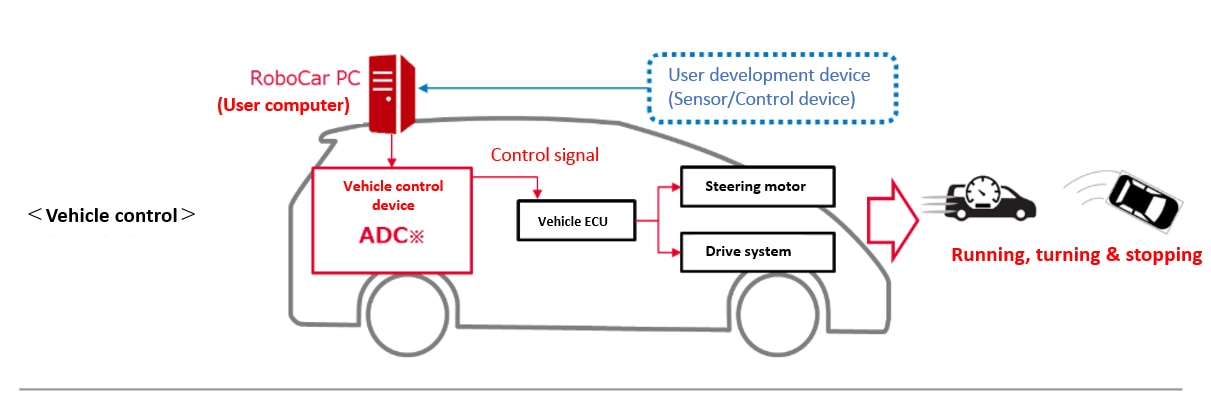
「RoboCar MiniVan」は、市販ハイブリッドミニバン車両をベースに、ユーザーが外部装置(PCや専用装置)より制御信号を入れることで制御ができるようにZMPの制御装置を組み込んだ車両型実験装置(車両本体および開発環境を含むパッケージ)です。
通常はドライバーの操作(アクセル・ブレーキを踏む、ステアリングを回す)で制御される車両をユーザーのコンピューターや専用装置から制御できるため、自動運転やADAS(高度運転支援システム)の開発の現場において、センサーやソフトウェアの開発・検証を実車上で行うためのプラットフォームとして活用することができます。
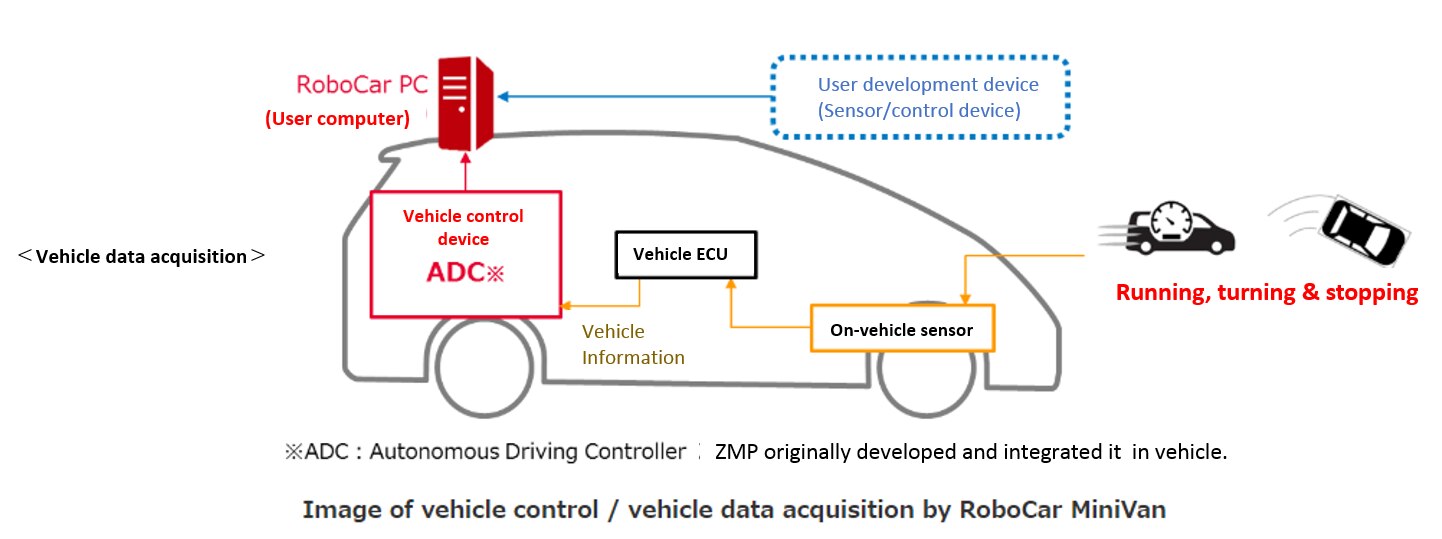
RoboCar MiniVanは車両に標準で搭載されているセンサーなどの値(車速、四輪車輪速やステアリング角度などのCAN情報)を取得でき、かつPCやその他外部装置から車載ネットワークCAN(Control Area Network)を介してアクセルやブレーキ、ステアリングなどの操作信号を入力し車両を制御することができるようになっています。またこれらのデータ取得、操作信号入力のためのAPIやサンプルアプリケーションも標準で用意しているため、導入後すぐに車両制御のプログラムを構築することができるプラットフォームとしてご提供しています。
また、従来どおりドライバーが運転することもでき、さらに車両がコンピューター制御されている最中にドライバーの操作が介入すると制御がドライバー操作に引き継がれる「オーバーライド機能」も提供しているため、ADAS・自動運転の実験に適しています。
通常はドライバーの操作(アクセル・ブレーキを踏む、ステアリングを回す)で制御される車両をユーザーのコンピューターや専用装置から制御できるため、自動運転やADAS(高度運転支援システム)の開発の現場において、センサーやソフトウェアの開発・検証を実車上で行うためのプラットフォームとして活用することができます。
RoboCar MiniVanは車両に標準で搭載されているセンサーなどの値(車速、四輪車輪速やステアリング角度などのCAN情報)を取得でき、かつPCやその他外部装置から車載ネットワークCAN(Control Area Network)を介してアクセルやブレーキ、ステアリングなどの操作信号を入力し車両を制御することができるようになっています。またこれらのデータ取得、操作信号入力のためのAPIやサンプルアプリケーションも標準で用意しているため、導入後すぐに車両制御のプログラムを構築することができるプラットフォームとしてご提供しています。
また、従来どおりドライバーが運転することもでき、さらに車両がコンピューター制御されている最中にドライバーの操作が介入すると制御がドライバー操作に引き継がれる「オーバーライド機能」も提供しているため、ADAS・自動運転の実験に適しています。
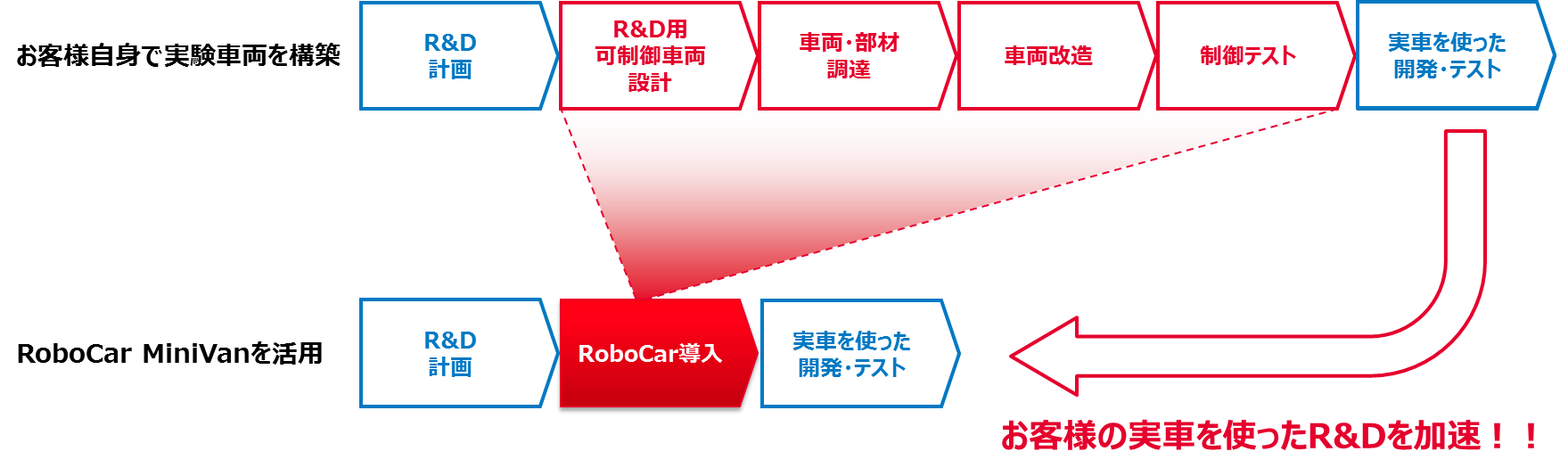
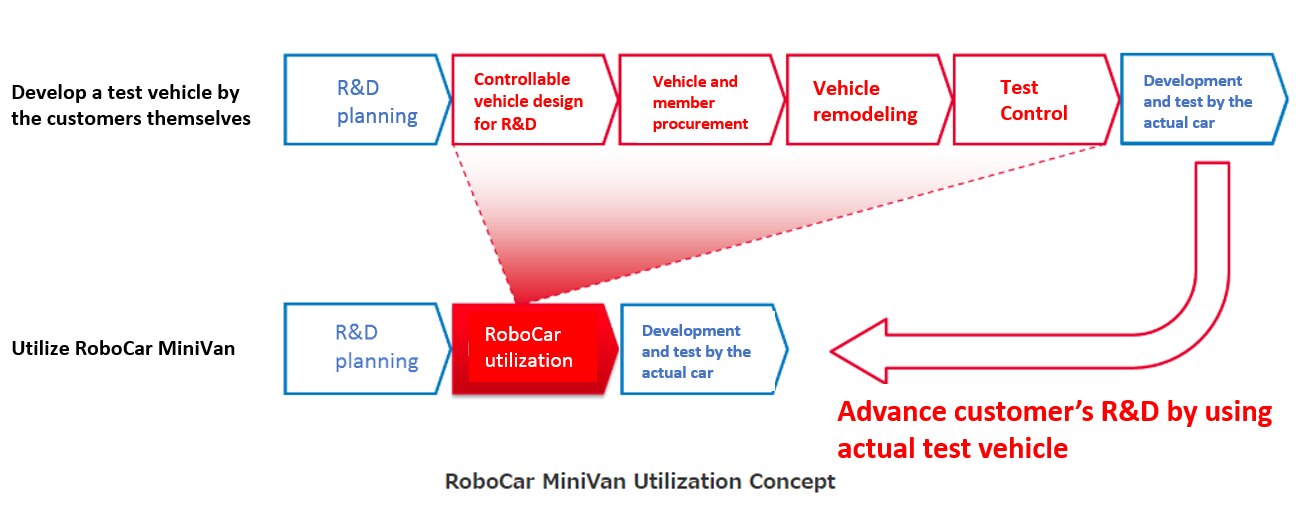
【RoboCar MiniVanのコンセプト】
ADASや自動運転の開発・実験のフィールドにおいては、実車両でのテストが欠かせません。
しかし、市販の車両は外部装置からの走る・曲がる・止まるの操作はドライバーがアクセル・ブレーキ・ステアリングなどを操作することでしか制御ができません。
そこでZMPでは、市販ハイブリッド車両をベースとしたコンピューター制御ができる機能と開発環境をセットとしたRoboCar MiniVanを提供することで、通常でれば外部から制御可能な車両を開発工程(設計~調達~改造~テスト)の手間からお客様を解放し、実車を使ったADAS・自動運転の開発を一気に加速できるようなご提案をしております。
【利用用途例】
ユーザー様はRoboCar MiniVanの車両情報取得機能や車両制御機能を利用することで、以下の様な目的・用途にご活用いただけます。
|
【ADAS(高度運転支援システム)】 -車載カメラ、レーザーセンサーや電波レーダーからのデータからRoboCar MiniVanの制御へ接続し、 ADAS(自動ブレーキ、 レーンキープ、レーンチェンジ、自動駐車など)のためのセンサー開発、センサフュージョン開発、 センシングと制御の統合開発、性能検証を実施 -RoboCar MiniVanからの取得情報を利用したHMI(Human Machine Interface)の開発
【自動運転】 -自動運転の「認知」~「判断」~「操作」のソフトウェア開発とRoboCar MiniVan上でのシステム動作検証 -自動運転のためのセンサー、デバイス開発 -車々間通信や路車間通信、または遠隔監視・操作通信など、自動運転の周辺システムの開発や検証 -自動運転を活用した新たなモビリティに関する実証実験
|
【ミニバンタイプを採用したRoboCar MiniVanのメリット】
またRoboCar MiniVanは、7~8人乗りのミニバンタイプをベースとしているため、以下の様なメリットがあります。
|
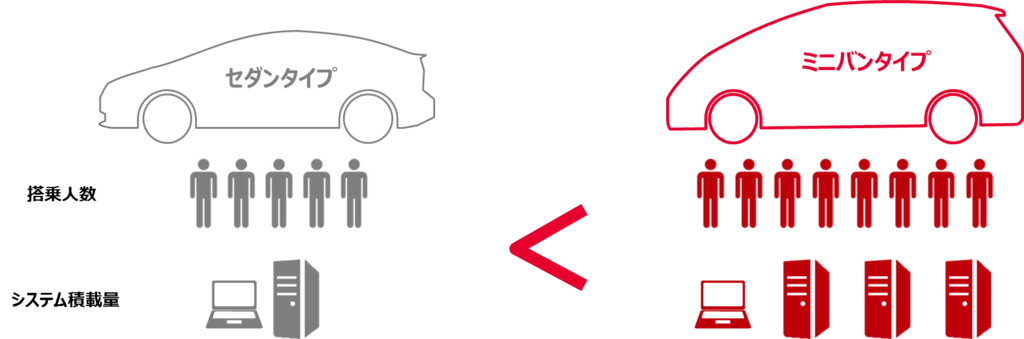
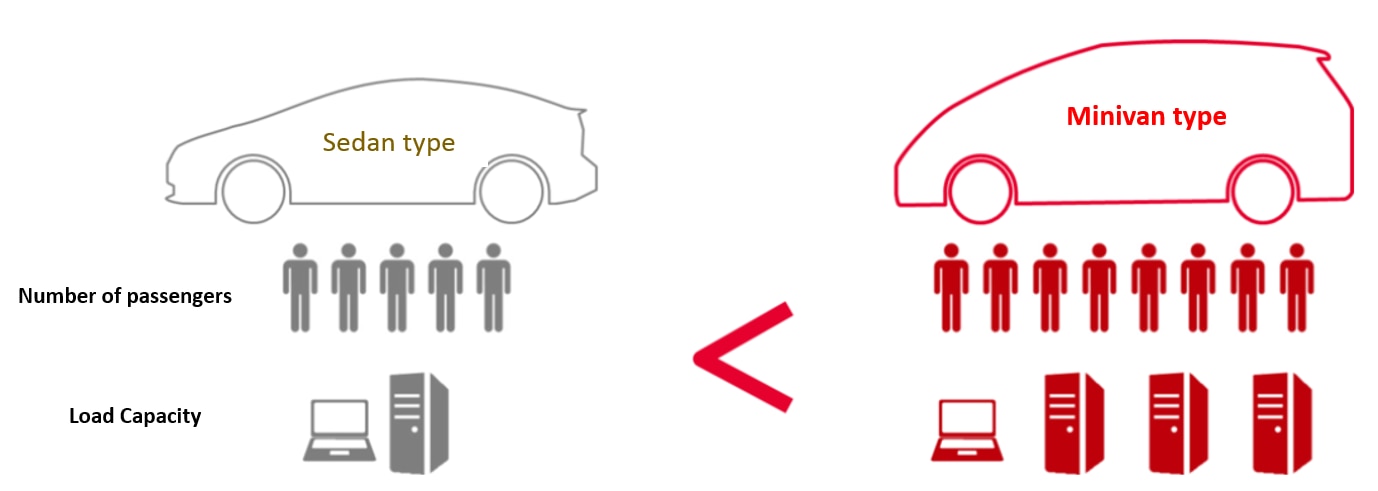
ミニバンタイプを採用したRoboCar MiniVanの特徴
RoboCar MiniVan 製品説明メニュー
製品のお問い合せはこちら








© ZMP INC. All Rights Reserved.