

自動運転車開発プラットフォームRoboCar MiniVan
基本仕様
【RoboCar MiniVanの車両仕様】
| ベース車両 | トヨタエスティマハイブリッド |
| 年式 | 2009年~2012年 ※今後年式拡大予定 |
| 乗車定員 | 7、8名(選択) |
| サイズ | 長4.8m×幅1.82m×高1.76m |
| 重量 | 2,355kg |
| ホイールベース | 2.95m |
| 駆動機構 | フロントエンジン 電気式四輪駆動(E-Four) |
【RoboCar MiniVanの基本構成と機能】
RoboCar MiniVanはCANバスやアナログ配線に、ZMPが独自に開発した制御装置(ADC:Autonomous Driving Controller)を介して、走る・曲がる・止まるの制御や、車速やステア角、走行距離車両の各種車両情報の取得を行うことができるようになっています。
車両制御では、アクセルやブレーキ、ステアリング等のセンサーから各ECUの間にADCが電気的に介入を行い操作信号と同等の信号を入力することで車両の制御を行います。
また各種車載センサー類からECU経由でCANバスに出力されている車両情報を、CANバスに介入したADCによりユーザー端末より取得することができます。
車両制御では、アクセルやブレーキ、ステアリング等のセンサーから各ECUの間にADCが電気的に介入を行い操作信号と同等の信号を入力することで車両の制御を行います。
また各種車載センサー類からECU経由でCANバスに出力されている車両情報を、CANバスに介入したADCによりユーザー端末より取得することができます。
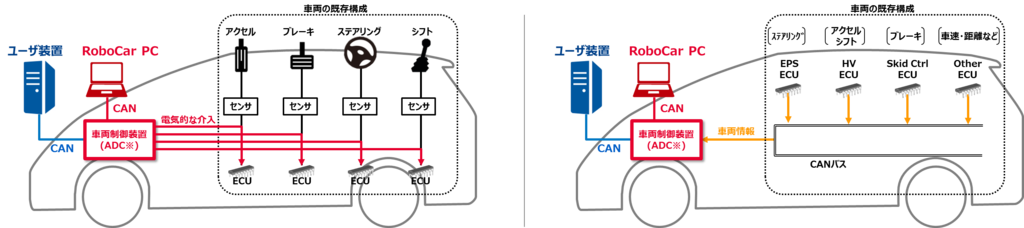
<車両制御イメージ> <車両情報取得イメージ>
RoboCar MiniVanの基本構造
1.車両CAN情報の取得
以下の車両CAN情報をADCで取得することができます。
-ステアリング操舵角 -ブレーキON/OFF
-アクセル踏み込み量 -速度
-車輪速度(右前・左前・右後・左後) -シフトポジション
-エンジン回転数 -クーラント温度
-オドメーター -ドア開閉状態
-ライト点灯状態
※ブレーキ踏み込み量、ウィンカー状態などについては、ADCからの制御値を取得することができます。
2.モード切替え機能/オーバーライド
RoboCar MiniVan は、普通車として運転して走行できる「Manual モード」と、プログラムからの制御で走行する「Program モード」を切り替えることができます。
Program モードでの走行中、ステアリングホイールを操作したときはステアリング制御が、アクセル/ブレーキペダルを操作したときはドライブ制御が、それぞれ Program モードから Manual モードへ移行する「オーバーライド機能」を備えています。
この機能により、実験中に危険を感じたときにステアリングやブレーキを操作することで、外部装置による制御からドライバー制御へ引き継ぎ安全を確保できるようになります。
Program モードでの走行中、ステアリングホイールを操作したときはステアリング制御が、アクセル/ブレーキペダルを操作したときはドライブ制御が、それぞれ Program モードから Manual モードへ移行する「オーバーライド機能」を備えています。
この機能により、実験中に危険を感じたときにステアリングやブレーキを操作することで、外部装置による制御からドライバー制御へ引き継ぎ安全を確保できるようになります。
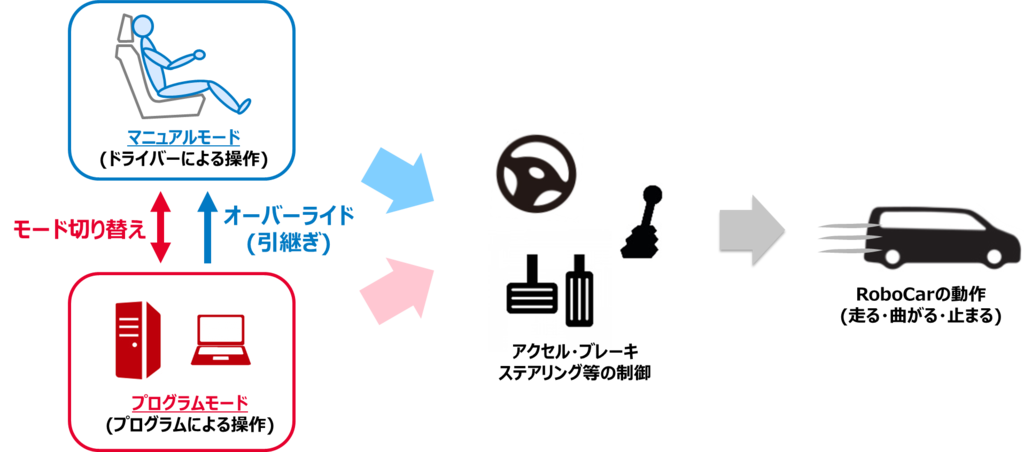
RoboCar MiniVanのモード切り替えとオーバーライド
またRoboCar MiniVanのモードについては、車内にインジケーターボックスが設置されており、アクセル、ブレーキ、ステアリング、シフトがそれぞれプログラムモードになっているときは点灯で表示されるようになっています。
ボタンを押下することでそれぞれをプログラムモードからマニュアルモードへ切り替えることもできます。
ボタンを押下することでそれぞれをプログラムモードからマニュアルモードへ切り替えることもできます。

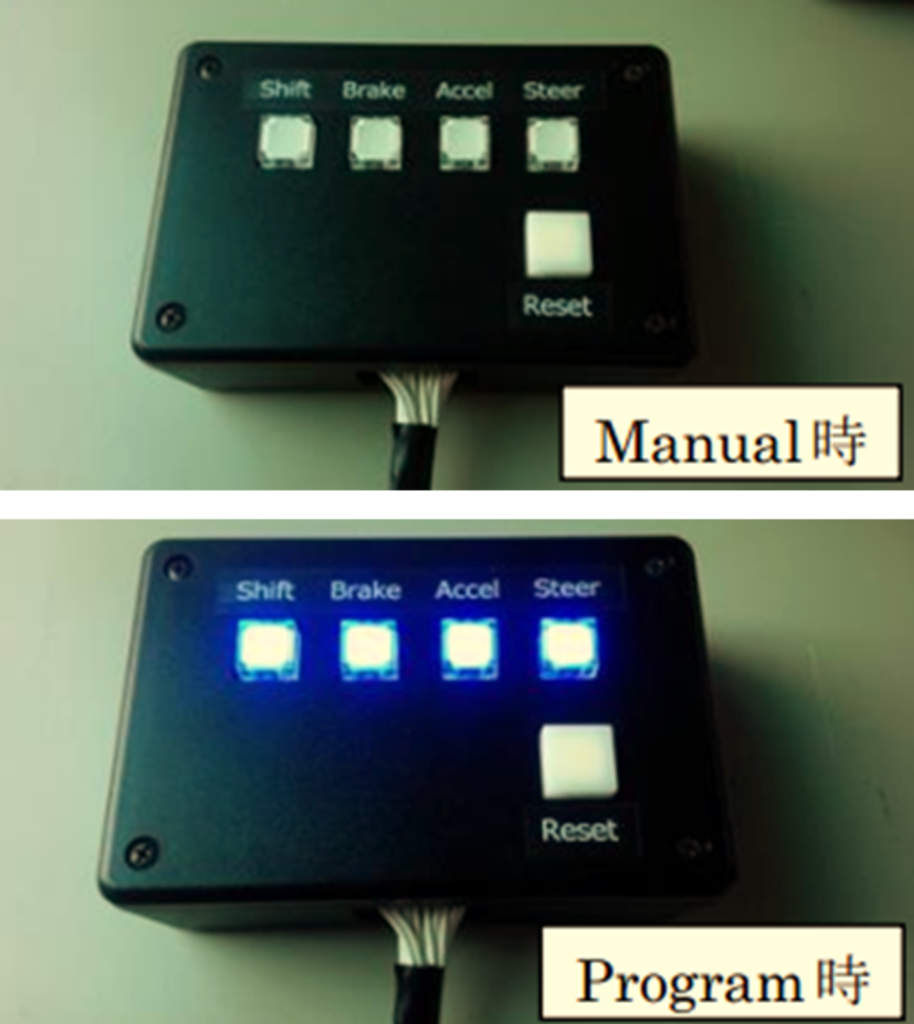
インジケーター(モード状態表示、モード切り替え)
3.ドライブ制御機能
RoboCar MiniVanは、標準搭載のRoboCar PC、またはユーザー専用装置から「走る」・「止まる」の前後移動を行うための制御方式として、アクセルとブレーキを組み合わせて以下の2つの方法での制御をできるようになっています。
(1)Velocity(速度)モード
(2)ペダルモード
以下に2つの制御モードについてそれぞれ説明します。
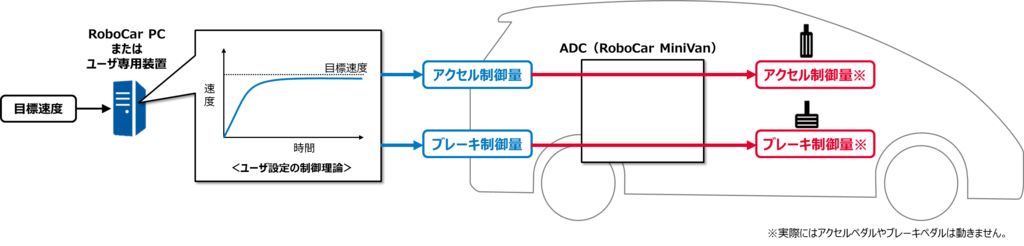
(1)Velocity(速度)モード
車両の走行速度の目標値を入力値として与えるモードです。目標値への制御はZMPが独自にADC内部で設定しており、パラメーターの設定により制御ゲインを変更することができるようになっています。 ユーザーとしては目標速度を入力するだけのため、扱いやすいモードです。

RoboCar MiniVanの 『Velocityモード』 による制御イメージ
(2)Pedalモード
アクセルとブレーキの踏み込み量(強さ)を入力値として与えるモードです。目標値への制御プログラムはユーザー自身が独自に構築することができ、RoboCar MiniVanはアクセルとブレーキの制御量を、ADCを介してそのまま車両へ伝達します。 目標速度へ到達させるための制御ロジックをきめ細かくユーザが定義できるモードです。
RoboCar MiniVanの 『ペダルモード』 による制御イメージ
4.操舵制御機能
RoboCar MiniVanのプログラムモードでは、車両に搭載されているEPSモーターを利用して標準搭載のRoboCar PC、
またはユーザー専用装置から「曲がる」の操作を行うステアリングの位置(角度)制御をすることができます。
方式として、以下の2つの方法での制御を選択できるようになっています。
(1)Angle(角度)モード
(2)Torque(トルク)モード
以下に2つの制御モードについてそれぞれ説明します。
(1)Angle(角度)モード
ステアリングの操舵角の目標値を入力値として与えるモードです。
目標値への制御はPID制御(※)で行われており、パラメーターの設定により制御ゲインを変更することができるようになっています。
範囲はステアリングホイールの角度で右回転666度~左回転666度まで入力することができます。
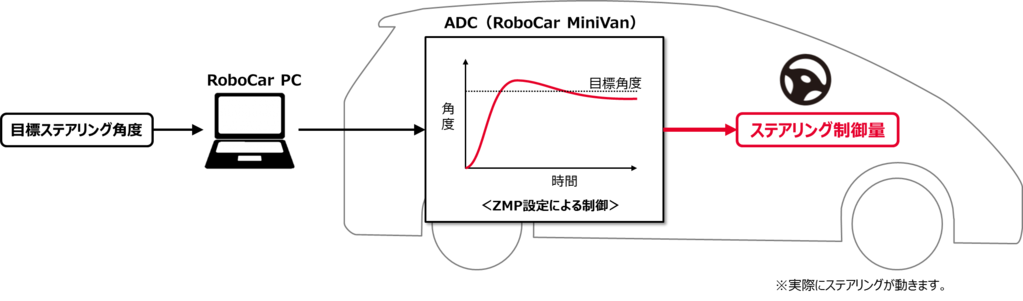
RoboCar MiniVanの 『Angle(角度)モード』 による制御イメージ
(2)Torque(トルク)モード
ステアリングのEPSモーターへのトルク量を入力値として与えるモードです。
操舵トルク量指示は指令コマンドを受け取った瞬間に反映され、範囲は-4096(右回転)から 4096(左回転)で、EPSモーターへ、トルクセンサの出力として与えられます。
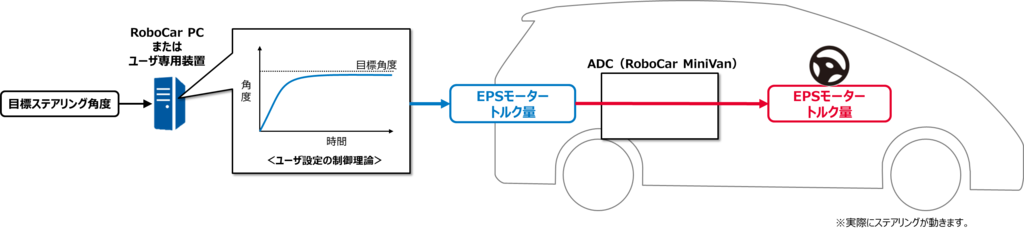
RoboCar MiniVanの 『Torque(トルク)モード』 による制御イメージ
5.灯火器制御機能
RoboCar MiniVanの灯火器類として、以下をRoboCar PCまたはユーザー専用装置から制御することができます。
-前方ライト
-左右ウィンカー
-ブレーキランプ
6.安全機能
RoboCar MiniVanには以下の安全機能が装備されています。
-ベース車両そのものの安全機能
ベース車両に備わっているABS(アンチロックブレーキングシステム)機能、エアバック機能、その他警告表示などは、RoboCar MiniVanではそのまま維持されています。
-クリティカルなエラー発生による強制マニュアルモードへの移行
プログラムモードで動作中に以下の様な事象が発生すると強制的にマニュアルモードへ移行し、ドライバーの運転へ引き継がれます。
・一定時間上位コントローラー側からの指令値がない
・ベース車両のCAN通信エラー
・ベース車両にセンサー異常
-非常停止ボタンの装備
RoboCar MiniVanには、写真のような緊急停止ボタンが設置されています。(設置場所はユーザーにて変更可能)
緊急停止ボタンを押下すると、速度指令値ゼロが入力され、車両が停止します。

緊急停止ボタン
7.コンフィグ
RoboCar MiniVanには、各種パラメーターをコンフィグとして設定できるような機能を有しています。
走行環境の変化など、必要に応じて制御パラメーター、オーバーライド閾値、指令値のリミットなどをコンフィグの書き換えにより変更することができます。
また、RoboCar PCではコンフィグを設定しやすいようGUIもご用意しています。
走行環境の変化など、必要に応じて制御パラメーター、オーバーライド閾値、指令値のリミットなどをコンフィグの書き換えにより変更することができます。
また、RoboCar PCではコンフィグを設定しやすいようGUIもご用意しています。
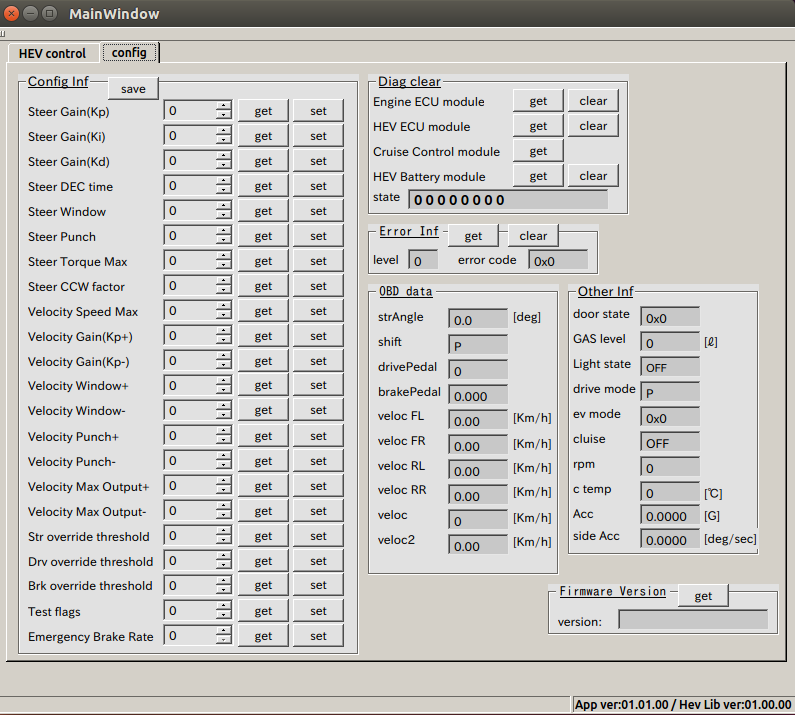
RoboCar MiniVanのコンフィグ設定画面
8.API
RoboCar MiniVanに搭載される Control PC 内にユーザーのアプリケーションをインストールして動作させることができます。開発言語は、C、C++です。
Control PC 上ではLinuxが動作しており、ユーザーアプリケーションは、Linuxの一つのプロセスとして動作します。
RoboCar MiniVan をコントロールし、情報を取得するための通信ライブラリを提供しています。
APIの詳細はAPIリファレンスが本体一式の中に含まれています。
Control PC 上ではLinuxが動作しており、ユーザーアプリケーションは、Linuxの一つのプロセスとして動作します。
RoboCar MiniVan をコントロールし、情報を取得するための通信ライブラリを提供しています。
APIの詳細はAPIリファレンスが本体一式の中に含まれています。
RoboCar MiniVan 製品説明メニュー
製品のお問い合せはこちら







© ZMP INC. All Rights Reserved.