

RoboCar1/10X MATLABコネクション2021
概要・特徴
MATLAB/Simulinkプログラムにより、RoboCar1/10Xの現在位置から、任意の位置と向きまでの経路を設計することができます。
例えば、自動駐車や車線変更・障害物回避などの自動走行の研究開発の場合、目標の位置と向きに従って最適(ハンドル操作がスムーズかつ横Gの少ない)な経路を算出し、車両二輪モデルを用いてMATLAB/Simulinkにより操舵角の推定を行います。
この操舵角に基づき、MATLAB/Simulink上でのシミュレーションを行うことができ、計画した経路とシミュレーション結果との比較や
その差異に基づく経路制御が可能となります。同じMATLAB/SimulinkプログラムによりRoboCar1/10Xの実機の動作が可能なため、
シミュレーションおよび実環境でのセンサデータを用いた実験を効率的に行うことができます。
※MATLABコネクションオプションはRealTime Workshopに対応しておりません。
■特徴
・現在位置から任意の位置と向きまでの最適(ハンドル操作がスムーズかつ横Gの少ない)な経路を算出
・MATLAB/SimulinkのブロックによりRoboCar1/10Xの動作および各種データの取得が可能
・MATLAB/Simulinkのみ(RealTimeWorkshop不要)で実時間シミュレーション・制御が可能
・シミュレーションのためのRoboCar1/10Xの車両モデルを提供
・すぐに実験に使えるサンプルプログラムを提供
例えば、自動駐車や車線変更・障害物回避などの自動走行の研究開発の場合、目標の位置と向きに従って最適(ハンドル操作がスムーズかつ横Gの少ない)な経路を算出し、車両二輪モデルを用いてMATLAB/Simulinkにより操舵角の推定を行います。
この操舵角に基づき、MATLAB/Simulink上でのシミュレーションを行うことができ、計画した経路とシミュレーション結果との比較や
その差異に基づく経路制御が可能となります。同じMATLAB/SimulinkプログラムによりRoboCar1/10Xの実機の動作が可能なため、
シミュレーションおよび実環境でのセンサデータを用いた実験を効率的に行うことができます。
※MATLABコネクションオプションはRealTime Workshopに対応しておりません。
■特徴
・現在位置から任意の位置と向きまでの最適(ハンドル操作がスムーズかつ横Gの少ない)な経路を算出
・MATLAB/SimulinkのブロックによりRoboCar1/10Xの動作および各種データの取得が可能
・MATLAB/Simulinkのみ(RealTimeWorkshop不要)で実時間シミュレーション・制御が可能
・シミュレーションのためのRoboCar1/10Xの車両モデルを提供
・すぐに実験に使えるサンプルプログラムを提供
アプリケーション
経路設計
任意の位置と向きに向け経路設計を行い、車両二輪モデルにより操舵角を推定し、シミュレーションおよび実機の走行ができます。
設計経路とシミュレーション結果、RoboCar1/10Xの軌跡の確認が可能です。
設計経路とシミュレーション結果、RoboCar1/10Xの軌跡の確認が可能です。
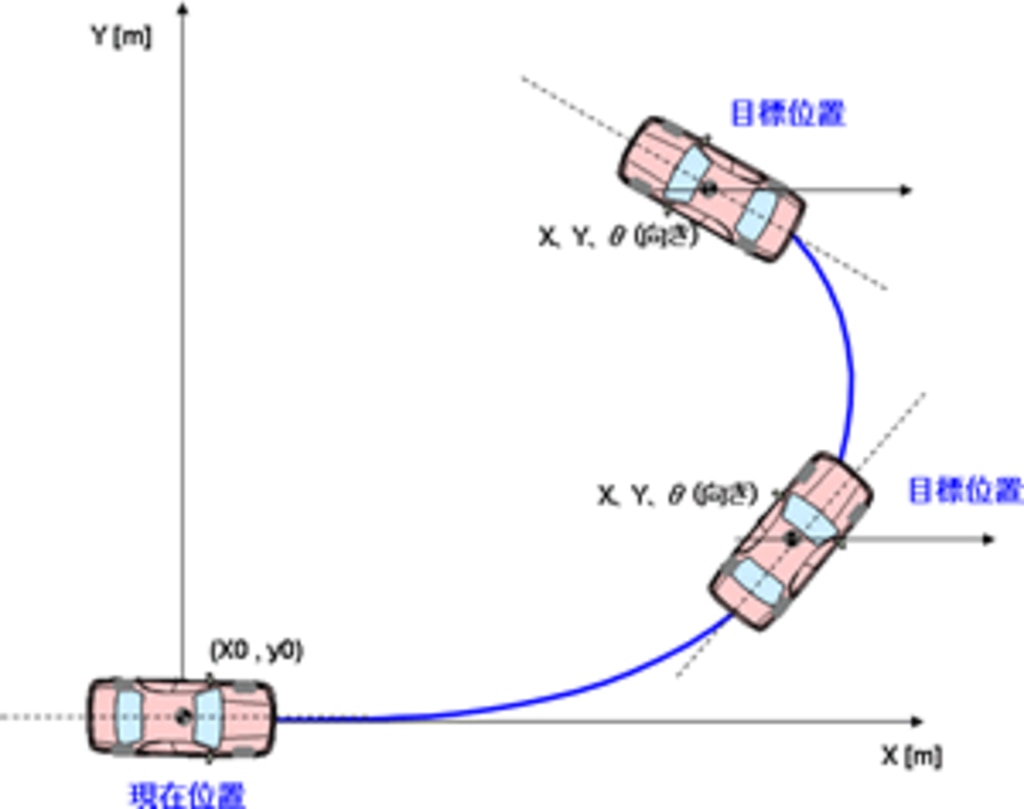
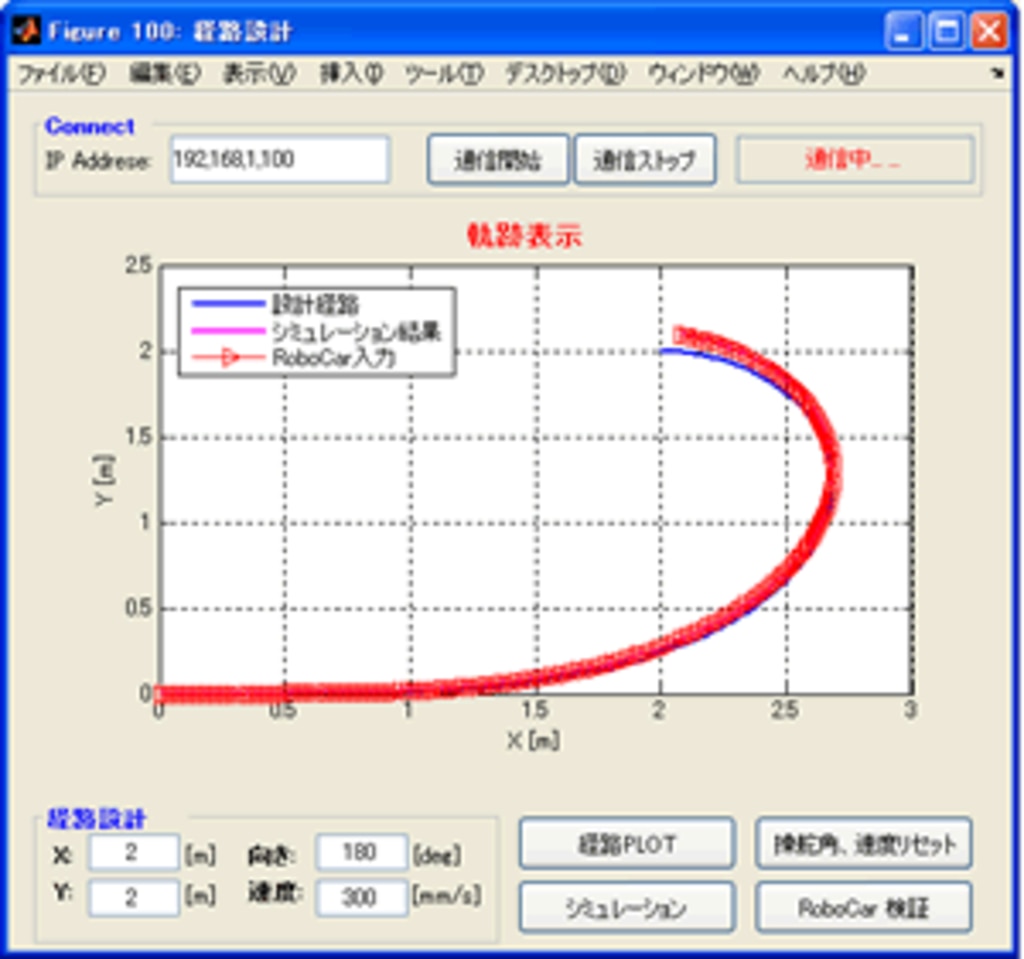
経路設計イメージ 設計経路とシミュレーション結果
RoboCar1/10X軌跡の比較
RoboCar1/10X軌跡の比較
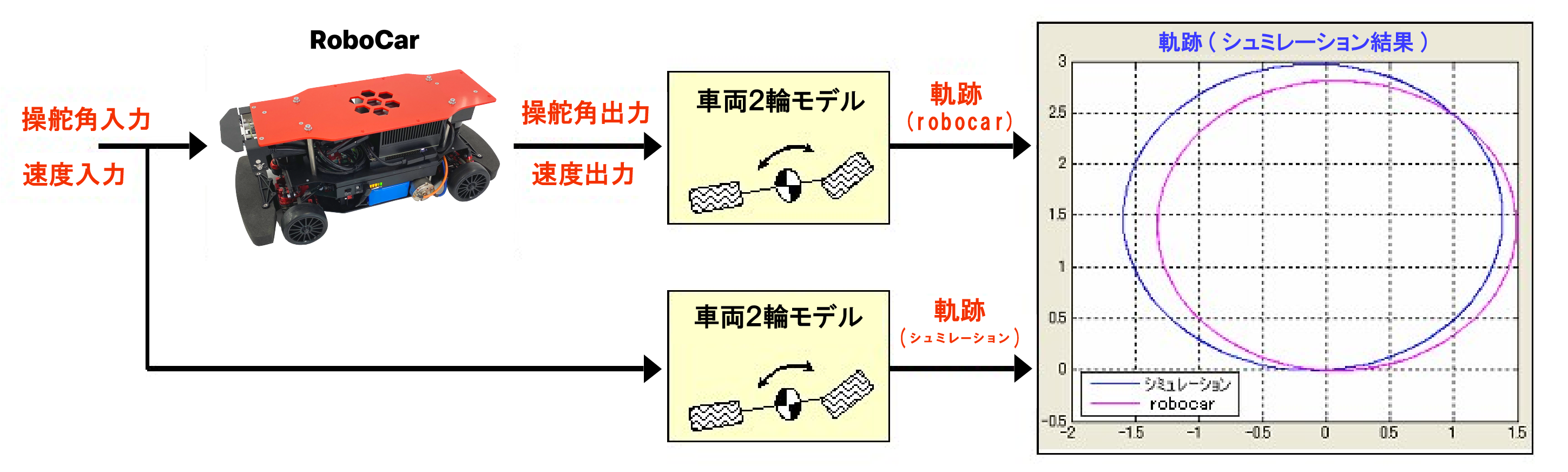
RoboCarシミュレーション
操舵角、速度の入力値により得られるシミュレーション結果の軌跡とRoboCar 1/10Xの実際の操舵角、
速度による走行の軌跡をグラフ上に重ね合わせて表示します。
速度による走行の軌跡をグラフ上に重ね合わせて表示します。
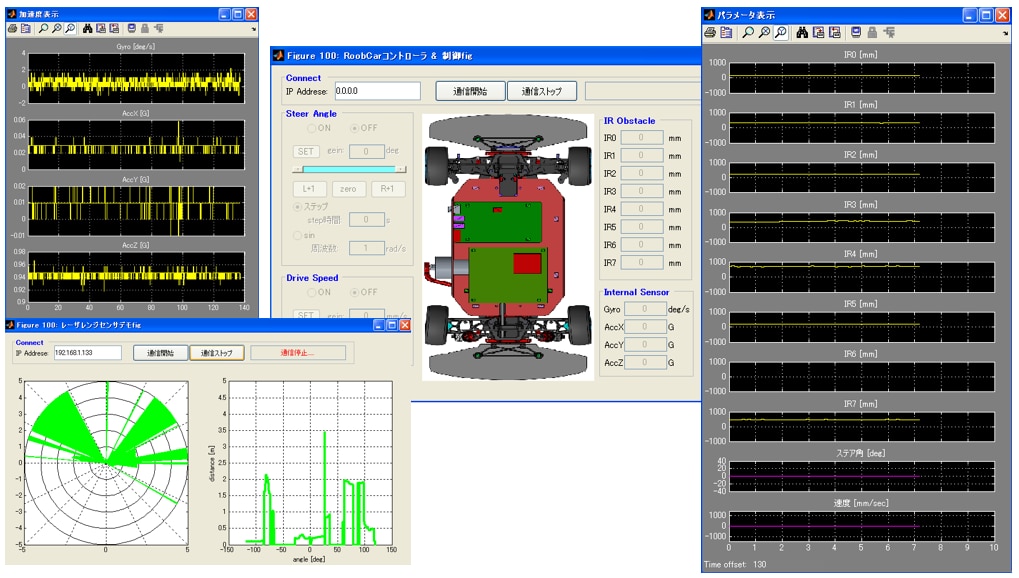
RoboCarコントローラ
レーザレンジセンサ、ジャイロセンサ、加速度センサの計測値をリアルタイムに表示することが可能です。
RoboCarに搭載されたレーザレンジセンサの値は100msで更新・表示します。
水平面上での表示に加え、障害物までの距離をグラフ化して表示します。
RoboCarに搭載されたレーザレンジセンサの値は100msで更新・表示します。
水平面上での表示に加え、障害物までの距離をグラフ化して表示します。
軌跡追従デモ
RoboCar1/10Xを遠隔操作した際の軌跡を記録し、自動走行を行うことができます。
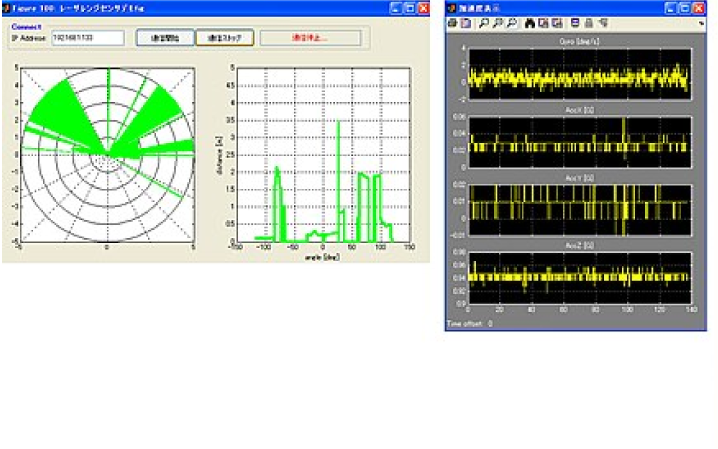
(左図:レーザレンジセンサ表示/右図:ジャイロ・加速度センサ表示)
仕様、動作環境
仕様
・データ送受信
・速度指令値、操舵角
・モータ速度、ジャイロ、加速度、レーザレンジセンサ
・接続・設定機能をMATLAB関数で提供
・データリンクはSimulinkブロック(s-Function)で提供
・Simulinkから実時間のシミュレーション・制御が可能
・データ送信/受信周期は10[msec]
動作環境
PC:OS/Windows 10
ソフトウェア:MATLAB/Simulink 2021
・データ送受信
・速度指令値、操舵角
・モータ速度、ジャイロ、加速度、レーザレンジセンサ
・接続・設定機能をMATLAB関数で提供
・データリンクはSimulinkブロック(s-Function)で提供
・Simulinkから実時間のシミュレーション・制御が可能
・データ送信/受信周期は10[msec]
動作環境
PC:OS/Windows 10
ソフトウェア:MATLAB/Simulink 2021
価格
■RoboCar 1/10X MATLABコネクション2021 20万円(税別)
・すでにRoboCar1/10Xをお持ちの方向けとなります。
・上記価格にMATLAB/Simulinkのライセンス費用は含まれません。
・1/10X以前の機体をお持ちの方は別途お問合せください。
・すでにRoboCar1/10Xをお持ちの方向けとなります。
・上記価格にMATLAB/Simulinkのライセンス費用は含まれません。
・1/10X以前の機体をお持ちの方は別途お問合せください。
お問い合わせ・はこちら







© ZMP INC. All Rights Reserved.