

無人フォークリフトを実現する原理や技術
無人フォークリフトの自動運転を実現する原理や無人化を支える技術について紹介します。
無人フォークCarriRo Forkの原理や技術について
CarriRo Forkは、自己位置を推定する手段として、レーザ―と反射板を活用した「レーザー方式」による自己位置の推定を行って自律移動走行をしています。
また、無人化に伴い安全装備も搭載し、車両後方下には2D-LiDARを搭載し、周囲の障害物の状況を補足しながらの移動が可能です。
また、物流無人化の実現に向けた連携機能も開発しており、パレット無人搬送型CarriRo AD+との連携やクラウドサービスROBO-HI®による遠隔自動運転オペレーション機能にも対応しています。
下記にその一例を紹介しています。
また、無人化に伴い安全装備も搭載し、車両後方下には2D-LiDARを搭載し、周囲の障害物の状況を補足しながらの移動が可能です。
また、物流無人化の実現に向けた連携機能も開発しており、パレット無人搬送型CarriRo AD+との連携やクラウドサービスROBO-HI®による遠隔自動運転オペレーション機能にも対応しています。
下記にその一例を紹介しています。
1.レーザーを使った自己位置推定
CarriRo Forkの自動移動機能は、搭載する2D-LiDARと反射板により実現しています。反射板の位置が3点以上計測できていればCarriRo Forkは現在の位置を補足し自律移動が可能です。
センサーは無人フォークの上部約2.2mの位置に搭載されており、その高さに反射板を走行したいエリアに取り付けその位置を補足しています。
棚の位置情報については、棚の高さや位置情報を事前に無人フォークに教え込むことでその登録した位置を移動先にしていすることで経路を自動的に算出し自動運転を開始します。
センサーは無人フォークの上部約2.2mの位置に搭載されており、その高さに反射板を走行したいエリアに取り付けその位置を補足しています。
棚の位置情報については、棚の高さや位置情報を事前に無人フォークに教え込むことでその登録した位置を移動先にしていすることで経路を自動的に算出し自動運転を開始します。
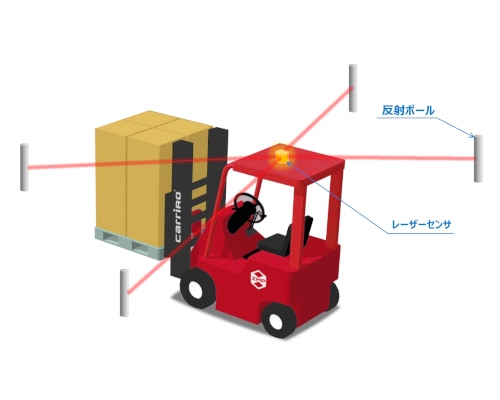
レーザ誘導型の無人制御イメージ

搭載する2D-LiDAR

設置する反射板
2.2D-LiDARを活用した障害物検出
本体後方には、2D-LiDARを搭載し後方周辺の障害物をモニターしながらの移動が可能です。障害物と認識する距離の範囲も変更可能なため、走行エリアに応じた設定を行えます。
本体が障害物があると認識した場合、走行を停止し、障害物が撤去された後に走行を継続します。
本体が障害物があると認識した場合、走行を停止し、障害物が撤去された後に走行を継続します。

リア部に搭載する2D-LiDAR

障害物を検出して停止シーン
3.物流支援ロボットCarriRo AD+との連携機能
最大600キロのパレット搬送が可能なCarriRo® AD+(パレット積載タイプ)とCarriRo® Forkを協働させることで、無人フォークリフトを複数台導入することに対して、大幅に導入コストを抑えてパレット搬送の無人化を実現します。

CarriRo AD+で搬送したパレットをCarriRo Forkで棚番号を指定し、倉庫内へ格納します。

棚番地を指定しCarriRo Forkでパレットを棚からピックアップし、CarriRo AD+へ搭載し搬出します。
4.クラウドサービスROBO-HI連携
2020年3月にリリースした、クラウドAI ROBO-HIシステムによる、複数台最適制御を導入することで、クラウドを介して遠隔のPCより無人搬送ロボットの制御が行えます。
CarriRo Forkは単体で動くことが可能で、通信設備やシステムを必要とせず、シンプルかつリーズナブルにお使い頂けるという特徴がありますが、クラウドサービスROBO-HI®と連携させることで、相互に強調した制御が可能となり、より高度な運用の実現、さらなる省人化の効果をあげることが可能となります。
CarriRo Forkは単体で動くことが可能で、通信設備やシステムを必要とせず、シンプルかつリーズナブルにお使い頂けるという特徴がありますが、クラウドサービスROBO-HI®と連携させることで、相互に強調した制御が可能となり、より高度な運用の実現、さらなる省人化の効果をあげることが可能となります。
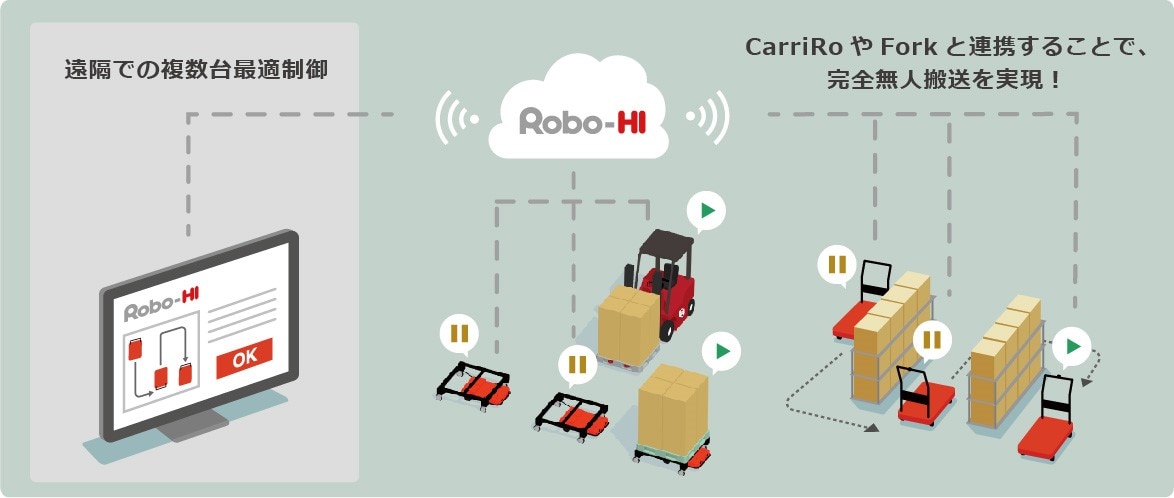
クラウドAI ROBO-HIシステム連携イメージ
カタログダウンロード
メールでお問い合わせ
物流に貢献する ZMP製ロボット関連製品
ZMP製の物流ロボット関連製品として、新しい物流方式を検討いただける台車型のロボットや一人乗り電気自動車型ロボットカー、宅配ロボットDeliRo(デリロ)など物流支援ロボットCarriRo(キャリロ)以外にも用途に応じて選択いただけるロボット製品を下記にてご紹介いたします。

CarriRo(キャリロ)
アシスト機能、追従機能、自律移動機能を搭載し物流を効率化

DeliRo(デリロ)
あらゆるものを自動で運ぶ。自律走行機能搭載した宅配ロボット

POWER WHEEL II
研究開発用移動台車プラットフォーム

RoboCar MV 2
一人乗り電気自動車ベース 自動運転開発プラットフォーム







© ZMP INC. All Rights Reserved.