自動運転開発プラットフォームRoboCar MiniVanと dSPACE MicroAutoBox IIによる自動走行実証実験を実施
自動運転開発プラットフォームRoboCar MiniVanと
dSPACE MicroAutoBox IIによる自動走行実証実験を実施
-ADAS・自動運転技術開発のラピッドプロトタイピングに-

RoboCar MiniVan走行試験の風景
株式会社ZMP(東京都文京区、代表取締役社長:谷口 恒、以下ZMP)が販売する自動運転開発プラットフォームRoboCar® MiniVanとdSPACE Japan株式会社のMicroAutoBox IIの連携による自動走行実証実験を行い、研究開発における有効性を確認いたしました。
自動運転技術開発用プラットフォーム「RoboCar MiniVan」は、市販トヨタエスティマハイブリッドをベース車両とし、車載ネットワークCAN(Control Area Network)を介して、ベース車両に搭載されているセンサ情報を取得でき、且つZMP 独自のコントローラーによってドライブやステアリングの制御が可能な、研究開発向けの実験プラットフォーム車両です。
dSPACE社のMicroAutoBox II は、高性能で豊富な自動車用入出力インターフェース、そして小型・堅牢な筐体を備えており、テスト対象の車両に搭載して制御ロジックの開発や信頼性を検証することができる制御開発用ツールです。インターフェースには主要な自動車バスシステム(※1)用インターフェースに対応し、自動車開発企業をはじめ幅広く利用されています。
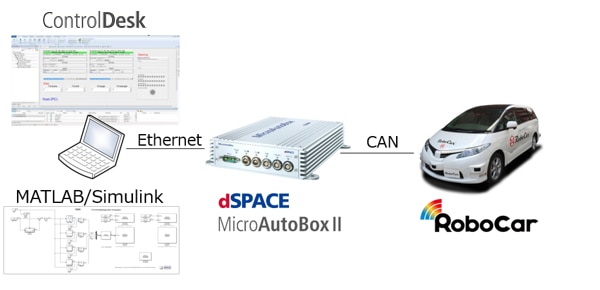
システム構成イメージ
本実証実験は、アクセル、ステアリング、ブレーキを変化させ、定常円旋回やスラロームといった自動走行をテストコース上で実施しました。テストツールとして、dSPACE社統合試験ソフトウェアControlDeskを利用、走行パラメータの確認や編集は、MicroAutoBox IIに接続したノートPC上でグラフィカルインタフェースにより直感的な操作が可能なため、テスト作業を効率的に実施することが可能です。本実証実験により、dSPACE社制御開発ツールMicroAutoBox IIとRoboCar MiniVanを組み合わせて、自動走行の実証実験がスムーズに進められることを確認しました。
RoboCar MiniVan とMicroAutoBox II の連携により、例えばMathWorks 社のMatlab® やSimulink® などを利用してMicroAutoBox II 上で行っていた制御ロジックやドライビングモデルのシミュレーションを、実車を用いて確認する手段としてRoboCar MiniVan を利用頂けるようになります。また、MicroAutoBox II の多様なインターフェースを活用し、車両への制御と同時に複数のセンサーやアクチュエーターを操作した制御の開発シーンへ、実車での確認として活用いただけるようになります。
ZMPは、これからも自動運転開発プラットフォームの提供や連携機能の強化を通じて、自動運転技術開発を支援して参ります。
※1: CAN(Control Area Network)、CAN FD(CAN with Flexible Data rate)、LIN(Local Interconnect Network)、K-Line/L-Line、FlexRay、Ethernetなど
RoboCar MiniVan とdSPACE MicroAutoBoxの連携について
http://www.zmp.co.jp/products/microautobox2
dSPACE MicroAutoBox IIについて
https://www.dspace.com/ja/jpn/home/products/hw/micautob.cfm
ZMP RoboCar Minivanについて
http://www.zmp.co.jp/products/robocar-minivan
RoboCar MiniVanの特長
・ CAN情報取得が可能(速度、ステアリング、アクセル、ブレーキ、シフトポジションなど)
・ オプションでステレオカメラやレーザレンジセンサ等の外界センサ、大容量バッテリシステム、などを搭載
・ ステアリング、アクセル、ブレーキを制御可能
・ ZMP独自コントローラによりユーザプログラムを実行可能
・ 自動制御モードとマニュアルモードの切り替え可能
【価格】
RoboCar MiniVan 1,800万円(税別)
※本実証実験では、RoboCar MiniVan とMicroAutoBoxIIの連携を行う、「MicroAutoBox II連携オプション」を利用しています。「MicroAutoBox II連携オプション」の導入に際しては、お問い合わせ下さい。
プレスリリース記事
プレスリリースPDFはこちらからご確認いただけます。