東京外環トンネル工事のバッテリー機関車を無人化
-マップなしでRoboVisionⓇのステレオ技術で実現、鹿島建設と共同開発-

ステレオカメラ RoboVision® 3
株式会社ZMP(東京都文京区、代表取締役社長:谷口恒、以下ZMP)と、鹿島建設株式会社(東京都港区、代表取締役社長:押味至一、以下鹿島建設)は新トモエ電機工業株式会社(東京都大田区、代表取締役社長:西尾公志)とカジマメカトロエンジニアリング株式会社(東京都港区、代表取締役社長:池田邦彦)と協力し、トンネル工事内で使用しているバッテリー機関車「サーボロコ」無人自動運転化を実施します。
自動運転バッテリー機関車「サーボロコ」には、ZMPのステレオカメラRoboVisionⓇ、自動運転ソフトウェアIZACⓇ、および3D LiDAR他各種センサーを搭載しています。またZMPのVTSⓇ(Virtual Tilt Stereo)技術を応用することで、周辺環境が常に変わるトンネル工事現場にて、高精度3Dマップを使用せずに建築限界(注1)の推定と安全のための障害物検出を可能にしています。

バッテリー機関車「サーボロコ」
乗用自動車の自動運転技術では標識や信号位置、横断歩道の位置など、周辺の環境を正確に把握した高精度3Dマップをベースに自己位置推定、障害物検出また走行経路生成などを実現していますが、トンネル工事現場では常にルートが延伸していくため高精度3Dマップを使用できません。そこで今回、ステレオカメラ技術を応用し高精度3Dマップなしで走行ルート上の建築限界推定を可能にする認識技術を開発し、バッテリー機関車に搭載しました。ディープラーニングを活用した人や物体の認識機能も併せて搭載し、現在無人運転化に向けた更なる性能向上に取り組んでいます。
ZMPと鹿島建設は、現在鹿島建設が共同企業体を設立し施工している東京外環プロジェクトにおける、本線トンネル(南行)東名北工事での全長9,155mのトンネル工事内で本自動運転バッテリー機関車を適用し、実際の施工現場での完全無人自動運転実現を目指します。
今後、他のトンネル工事施工現場での導入を実施していくことも目指しております。
【事例紹介ページ】
ステレオカメラRoboVision® 3 東京外環トンネル工事のバッテリー機関車を無人化https://www.zmp.co.jp/case/rv3_200422
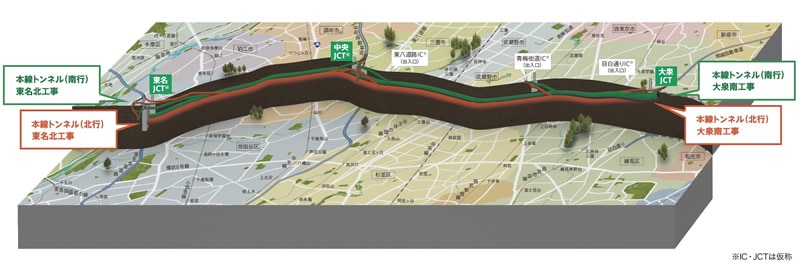
東京外環プロジェクト全体概要
(注1):バッテリー機関車は線路上を移動する車両であり、線路上に障害物があった場合にはこれを自由に避けることができない。運行の安全を確保するため、定められた範囲内には障害物となり得る建築物等(固定・非固定にかかわらず)を設置してはならないという概念。
【東京外環プロジェクト概要HP】
http://tokyo-gaikan-project.com/
【自動運転用ステレオカメラ RoboVision® 3概要】
RoboVision® 3は、ソニー製の車載向け高感度CMOSイメージセンサ「IMX390」を採用し、最大距離150メートル、水平画角110°と長距離で広い視野を持つ4眼ステレオカメラです。IMX390はHDRとLED信号のフリッカー抑制の同時処理が可能で、先進運転支援システム(ADAS)や自動運転技術で重要となる「認識」や「判断」の大幅な技術向上が期待できます。
【製品HP】:https://www.zmp.co.jp/products/sensor/robovision/robovision3
【プレスリリース記事】
プレスリリースPDFはこちらからご確認いただけます。
【高画質画像】
ステレオカメラ RoboVision® 3
バッテリー機関車「サーボロコ」
東京外環プロジェクト全体概要