


ADAS(先進運転支援システム)におけるセンサーの種類と役割について
ADAS(先進運転支援システム)は、システムが車両周辺の移動物体及び道路形状といった周辺環境を認識しなければなりません。その外部の環境を認識するためのセンサを「外界センサー」と呼びます。センシング技術の開発は、ADASだけでなく、AD(自動運転)の開発にも繋がります。
また、車両周辺の環境認識を正確に行うためには、1つのセンサだけでなく、様々な種類の外界センサを組み合わせた、いわゆるセンサフュージョン技術の開発も進んでいます。
また、車両周辺の環境認識を正確に行うためには、1つのセンサだけでなく、様々な種類の外界センサを組み合わせた、いわゆるセンサフュージョン技術の開発も進んでいます。
1. ADASで利用されるセンサーの種類
ADASに用いられるセンサーは、主に計測できる情報毎に以下のように大別されます。
・画像データ:カメラ
・距離データ:ライダーやミリ波レーダ
・位置データ:GPSやオドメーター
・速度、加速度、姿勢データ:IMU(Inertial Measurement Unit: 慣性計測ユニット)
などがあります。
本ページではそれらセンサーのうち、周辺の状況を察知するカメラとレーダについて解説をします。また複数のセンサーを組み合わせた、センサーフュージョン技術についても触れます。
・画像データ:カメラ
・距離データ:ライダーやミリ波レーダ
・位置データ:GPSやオドメーター
・速度、加速度、姿勢データ:IMU(Inertial Measurement Unit: 慣性計測ユニット)
などがあります。
本ページではそれらセンサーのうち、周辺の状況を察知するカメラとレーダについて解説をします。また複数のセンサーを組み合わせた、センサーフュージョン技術についても触れます。
2. ADASでレーダが果たす役割
レーダを用いたADAS(先進運転支援システム)の機能には、
・車間距離制御(ACC: Adaptive Cruise Control)
・前方衝突警報(FCW: Front Collision Warning)
・衝突被害軽減制動制御装置(AEBS: Autonomous Emergency Braking System)
・ブラインドスポットモニタリング(BSM: Blind Spot Monitering)
・駐車支援(PA: Parking Assist)
などがあります。各機能についての詳細は、ADAS機能の紹介で解説をしています。
自動車に搭載されるレーダには、近距離レーダ、遠距離レーダー、レーザーレーダ、超音波レーダなどがあり、それぞれに特徴があります。
・車間距離制御(ACC: Adaptive Cruise Control)
・前方衝突警報(FCW: Front Collision Warning)
・衝突被害軽減制動制御装置(AEBS: Autonomous Emergency Braking System)
・ブラインドスポットモニタリング(BSM: Blind Spot Monitering)
・駐車支援(PA: Parking Assist)
などがあります。各機能についての詳細は、ADAS機能の紹介で解説をしています。
自動車に搭載されるレーダには、近距離レーダ、遠距離レーダー、レーザーレーダ、超音波レーダなどがあり、それぞれに特徴があります。
3. ADAS用レーダーの種類
3-1.レーザレーダ(LiDAR,ライダー)
レーザーレーダとは光を用いたリモートセンシング技術の1つで、パルス状に発光するレーザ照射に対する錯乱光を測定し、遠距離にある対象までの距離や、その対象の性質を分析するものです。
日本語では「ライダー(LiDAR)」と呼びます。なお、LiDARは英語:Light Detection and Ranging、Laser Imaging Detection and Ranging)の頭文字から由来しています。
一般的な方式として、LiDARはパルスレーザービームが内部の回転ミラーで方向を変えて、周辺エリアを扇状にスキャンします。発射されたレーザー光は物体に当たると反射され反射光はスキャナの受光部で認識されます。
研究開発用途として、Velodyne社やRoboSense社などの回転式のVLP-16や、RS-LiDAR-32のようなセンサと、車載に対応すべく回転物を搭載せずにセンシングが可能なSolid State型(MEMS方式)のLiDARが開発されています。
LiDARが主な用途は、前方障害物までの距離の測定、縁石などによる道路形状の認識、反射率を利用した白線認識などがあります。
日本語では「ライダー(LiDAR)」と呼びます。なお、LiDARは英語:Light Detection and Ranging、Laser Imaging Detection and Ranging)の頭文字から由来しています。
一般的な方式として、LiDARはパルスレーザービームが内部の回転ミラーで方向を変えて、周辺エリアを扇状にスキャンします。発射されたレーザー光は物体に当たると反射され反射光はスキャナの受光部で認識されます。
研究開発用途として、Velodyne社やRoboSense社などの回転式のVLP-16や、RS-LiDAR-32のようなセンサと、車載に対応すべく回転物を搭載せずにセンシングが可能なSolid State型(MEMS方式)のLiDARが開発されています。
LiDARが主な用途は、前方障害物までの距離の測定、縁石などによる道路形状の認識、反射率を利用した白線認識などがあります。
各方式やその他研究・開発されている方式の特長については下記にまとめられています。
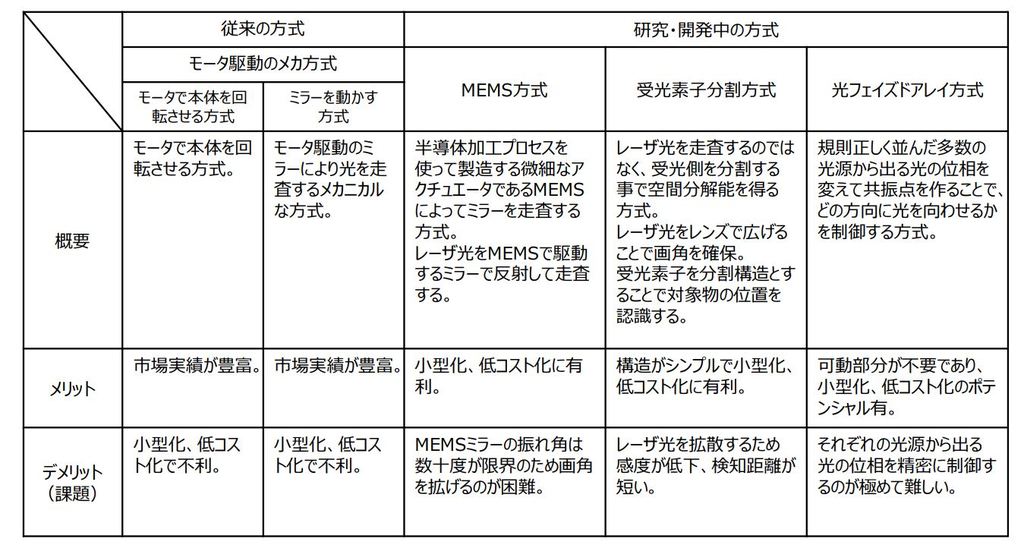
(平成28 年度スマートモビリティシステム研究開発・実証事業:自動バレーパーキングの実証及び高度な自動走行システムの実現に必要な研究開発成果報告書平成29 年3 月(委託先)一般財団法人日本自動車研究所 http://www.meti.go.jp/meti_lib/report/H28FY/000539.pdf より)
3-2.ミリ波レーダ
車両周辺の静止物体および移動物体までの相対距離を計測するためのセンサとして、レーザーレーダの他にミリ波レーダがあります。ミリ波を用いたセンサはレーザーを用いたセンサに比べ検知距離が長く、雨天性能/霧・雪での性能(全天候性)、相対速度の直接計測が可能であり、先行車両などの運動予測性能に優れているという特徴があります。また、要求される角度分解能(アンテナビーム幅)に対してアンテナ径が小さく、車両への搭載性に優れています。ミリ波レーダーは主に遠距離レーダ(150m以上の検知性能)として、ACCなどの機能を実現するためのセンサーとして各社で商品開発が進められています。
基本的に車載ミリ波レーダに対する法的技術要件は以下の通りとなります。
(1)無線周波数帯:76GHz帯
(2)空中線電力:10mW以下
(3)空中戦利得:40dB以下
(4)指定周波数帯幅:1GHz以内
基本的に車載ミリ波レーダに対する法的技術要件は以下の通りとなります。
(1)無線周波数帯:76GHz帯
(2)空中線電力:10mW以下
(3)空中戦利得:40dB以下
(4)指定周波数帯幅:1GHz以内
ZMPでは、研究・開発用向けに車載用ミリ波の取り扱いもございますので、
小ロットで研究開発に活用したいお客様はお問い合わせいただければと思います。
小ロットで研究開発に活用したいお客様はお問い合わせいただければと思います。
4. ADASにおける車載カメラ
車載カメラは、ドライブレコーダーやバックモニタなど、運転時の記録を保存したり、ドライバーの死角を補助するビューカメラなどとして普及をしてきました。近年は画像認識技術が発達し、取得した画像から道路標識や歩行者などを検知し、ドライバーに警告を発したり、自動車の動作を制御するためのセンシングカメラとしての役割を果たすようなりました。これによりADASにおいてカメラは重要な役割を担うようになりました。
ADASで利用される車載カメラには、以下の用途があります。
・周囲の視界補助システムとしての機能:アラウンド・ビュー・モニタ、ドライバが車の死角を映像で確認できる、
車線変更時における後側方障害物警報など
・後方画像による駐車支援
・単眼カメラで道路のレーンマーカを検知
・ステレオカメラで前方の障害物や先行者を検知
・速度表示などの道路標識の認識
・歩行者検知・衝突警報
・ドライブレコーダーのようなドライバ・自動車モニタリング
・ドライバモニタリング技術
ADASで利用される車載カメラには、以下の用途があります。
・周囲の視界補助システムとしての機能:アラウンド・ビュー・モニタ、ドライバが車の死角を映像で確認できる、
車線変更時における後側方障害物警報など
・後方画像による駐車支援
・単眼カメラで道路のレーンマーカを検知
・ステレオカメラで前方の障害物や先行者を検知
・速度表示などの道路標識の認識
・歩行者検知・衝突警報
・ドライブレコーダーのようなドライバ・自動車モニタリング
・ドライバモニタリング技術
カメラの詳細は「ADAS(先進運転支援システム)における車載カメラについて」でご紹介をしています。
ZMPでは、車載向けのカメラとして下記の製品を取り扱っております。

RoboVision2s
測距や物体検出ソフトに対応した超高感度ステレオカメラシステム

RoboVision3
最大150m、水平110°の距離と視野のセンシングが可能なステレオカメラ
5. ADAS用車載カメラの種類
車載カメラは撮像素子(イメージセンサ)による分類と、カメラ形式による分類があります。
5-1. イメージセンサによる分類
イメージセンサーについては、CCD(Charge-Coupled Device)形式とCMOS(Complementary Metal-Oxide Semiconductor)形式に分類されます。
CCDとはビデオカメラ、デジタルカメラなどに広く使用されている撮像素子(イメージセンサー)の一種です。撮影した画像を電気信号に変換する際に、受光素子が光から発生した電荷を読み出すために電荷結合素子と呼ばれる回路素子を用いて、データの転送を行っています。CCDは他の撮像素子に比べて相対的に感度が高く、ノイズが少ないという特徴があります。これまで自動車用車載カメラでは、CCDより低価格のCMOSを用いている場合が多かったのですが、画像認識の精度が高いCCD形式を採用する事例も増えてきました。コストと性能によって、適切な形式が選択されます。
CCDとはビデオカメラ、デジタルカメラなどに広く使用されている撮像素子(イメージセンサー)の一種です。撮影した画像を電気信号に変換する際に、受光素子が光から発生した電荷を読み出すために電荷結合素子と呼ばれる回路素子を用いて、データの転送を行っています。CCDは他の撮像素子に比べて相対的に感度が高く、ノイズが少ないという特徴があります。これまで自動車用車載カメラでは、CCDより低価格のCMOSを用いている場合が多かったのですが、画像認識の精度が高いCCD形式を採用する事例も増えてきました。コストと性能によって、適切な形式が選択されます。
5-2. 設置方式による分類
5-2-1. 単眼カメラ(モノカメラ)
単眼カメラとは文字通り1つのカメラレンズで機能するものを指します。
距離計測は認識した画像座標の縦方向のピクセル位置から算出しますが、誤差は大きくなる傾向にあります。主な利点としては、低コストで設置でき、設置場所の自由度が高いです。またキャリブレーションを容易に行うことができます。欠点としては認識する対象が限定されることです。具体的な用途として、車線維持を目的とした白線認識、制限速度などの交通標識を認識して運転者に警告機能、横断歩道認識などに用いられます。
距離計測は認識した画像座標の縦方向のピクセル位置から算出しますが、誤差は大きくなる傾向にあります。主な利点としては、低コストで設置でき、設置場所の自由度が高いです。またキャリブレーションを容易に行うことができます。欠点としては認識する対象が限定されることです。具体的な用途として、車線維持を目的とした白線認識、制限速度などの交通標識を認識して運転者に警告機能、横断歩道認識などに用いられます。
5-2-2.ステレオカメラ
ステレオカメラとは、人間の眼のように2つのカメラで対象を測定し、その視差により制度の高い距離測定を可能にしています。立体物を検知できるため、歩行者、自転車、車両などの様々な物体までの距離や横方向の位置を高い精度で計測できます。このようにして検出した情報を様々に利用できますが、キャリブレーションが難しく、計算量が増加することが欠点となります。具体的な用途として、車両認識や歩行者を認識する際に用いられます。
6. センサーフュージョン
センサフュージョンとは、上記でご紹介したカメラ、レーダ、ライダー(LIDAR)など複数のセンサからの情報を組み合わせて、周辺環境をより明確に把握できるようにする技術です。
これは、より信頼性の高い安全機能とより効果的な自律運転システムの実現に必要とされる技術です。
センサフュージョンはあらゆるタイプのセンサと関わる可能性があります。典型的な例が、フロントカメラとフロントレーダから提供される情報の統合です。
光学的検出で機能するカメラは、雨、濃霧、強い日差し、光のない状態といった状況においては問題を生じますが、路面標識など、色の認識においては高い信頼性を発揮します。
レーダは、たとえ低分解能であっても、距離の検知には有用で、環境条件に影響されることはありません。このようにセンサー同士の長所を補うことで、システムが周囲の状況をより精度高く把握することが可能となります。
これは、より信頼性の高い安全機能とより効果的な自律運転システムの実現に必要とされる技術です。
センサフュージョンはあらゆるタイプのセンサと関わる可能性があります。典型的な例が、フロントカメラとフロントレーダから提供される情報の統合です。
光学的検出で機能するカメラは、雨、濃霧、強い日差し、光のない状態といった状況においては問題を生じますが、路面標識など、色の認識においては高い信頼性を発揮します。
レーダは、たとえ低分解能であっても、距離の検知には有用で、環境条件に影響されることはありません。このようにセンサー同士の長所を補うことで、システムが周囲の状況をより精度高く把握することが可能となります。
6-1-1.ACC(Adaptive Cruise Control:アダプティブ・クルーズ・コントロール)
走行中の視界が良好で、前の車との車間が十分であれば、ACCは設定速度までスピードを上げます。同様に、前の車との距離が近づき過ぎると減速します。車両のクルーズ・コントロール・システムは、センサとカメラが周囲の状況を読み取り、適切な車速を維持します。
6-1-2. AEBS(Advanced Emergency Braking System:衝突被害軽減制動制御装置)
AEBSは自動車が障害物を検知して衝撃に備える機能の総称を意味しています。自動車に搭載したセンサとカメラを用いて前方車両との衝突を検知した瞬間にブレーキを制御するシステムです。
各社のADAS機能を評価した結果は、独立行政法人 自動車事故対策機構の予防安全性能アセスメントのページにて結果が掲載されております。
各社のADAS機能を評価した結果は、独立行政法人 自動車事故対策機構の予防安全性能アセスメントのページにて結果が掲載されております。
独立行政法人 自動車事故対策機構の予防安全性能アセスメント
7. ZMPのセンサー分野製品
ZMPではADAS開発に利用できる各種センサーをご用意しております。取扱いセンサーをご紹介します。
7-1. 加速度センサー

IMU-Z Cube
最大400Gの加速度計測可能な小型6軸モーションセンサ
7-4. LiDAR

RoboSense 3D-LiDAR
16レイヤー、32レイヤーの2タイプ、水平画角360°の全周囲スキャンが可能なLiDAR
8. ADASカメラ関連リンク
上記でも、ご紹介いたしましたが、ZMPではADAS開発に利用できるステレオカメラユニットをご用意しております。
RoboVision2s
測距や物体検出ソフトに対応した超高感度ステレオカメラシステム
RoboVision3
最大150m、水平110°の距離と視野のセンシングが可能なステレオカメラ
9. お問合わせ、資料請求
上記や製品に関する問合せ、資料請求については下記よりお問い合わせいただければと思います。






© ZMP INC. All Rights Reserved.