

New!
ステレオカメラRoboVision2sの3つの特徴をご紹介!
超高感度ステレオカメラシステム RoboVision2s

RoboVision2s外観

車載イメージ
ADAS/自動運転開発向け車載向けステレオカメラシステム
RoboVision2sは精度の高い距離計測を実現し、カメラを活用した開発や研究に貢献します!
ステレオカメラ(ステレオビジョン)システムRoboVision2sはこれまで100社以上の企業や大学へ導入され、研究開発や自動運転・ADAS開発のツールとして採用されております。
RoboVision2sは精度の高い距離計測を実現し、カメラを活用した開発や研究に貢献します!
ステレオカメラ(ステレオビジョン)システムRoboVision2sはこれまで100社以上の企業や大学へ導入され、研究開発や自動運転・ADAS開発のツールとして採用されております。
開発製品に活用されるステレオカメラRoboVision2sの4つの特徴
RoboVision2sは、ロボットの目として開発され、ヒーローの眼鏡のような特徴的なコンパクトな筐体に、USB給電で稼働しPCにケーブルを接続し、専用アプリを使うことで容易に画像取得が可能なステレオカメラです。
ソフトウェア環境(サンプルソフト、ソフトウェア開発キット)も整備し、ステレオカメラを使った開発に貢献いたします。
ソフトウェア環境(サンプルソフト、ソフトウェア開発キット)も整備し、ステレオカメラを使った開発に貢献いたします。
USB3.0に対応し、30fpsで簡単に長時間の画像を取得
対応インターフェースとして、USB3.0に対応しPCへ接続し、付属のアプリケーションで容易に画像が計測可能です。SSDを指定した画像取得で最大30fpsで4時間以上の連続画像計測も対応。

充実したソフトウェア開発環境、SDKも付属
ステレオカメラの接続、画像の取得・保存などのアプリケーションプログラムインターフェース(API)を用意し、計測した画像をユーザーのソフトウェアへの組み込みも容易に実施可能。
コンパクトで取り扱いやすい筐体
本体のサイズがW270.8mm×D109mm×H50mm、730gとコンパクトな筐体で、専用のマウントで車両のミラー部への搭載も容易に行えます。また、上面の1/4インチねじ穴を使った固定も可能です。

物体検出・画像連続計測機能に対応したオプションも用意
カメラ前方の画像計測結果より、物体の検出処理を行い、物体の幅、高さ、奥行きの情報を出力。最大1280×960ピクセルで30fpsのカラー映像を連続して10時間以上もの計測

ステレオカメラとは?
ステレオカメラ(すてれおかめら、stereo camera)とは、人が物を見る原理と同じように、2つのカメラ(2眼のカメラ)を用いて対象物を複数の異なる方向から同時に撮影することにより、カメラの画素の位置情報から、奥行き方向の情報も計測することが可能なカメラのことです。ADAS(先進運転支援システム)においてステレオカメラ(ステレオビジョン)は前方の車間距離や取得した画像を使い、自動ブレーキや白線認識などの運転支援に活用されるデバイスとなっております。
近年は量産車両にも搭載され、自動車を直接制御するためのセンサー機能を果たすようになりました。
ステレオカメラについての説明は自動運転・ADASを知るの「ステレオカメラについて」にまとめていますので、下記をページを参照ください。
近年は量産車両にも搭載され、自動車を直接制御するためのセンサー機能を果たすようになりました。
ステレオカメラについての説明は自動運転・ADASを知るの「ステレオカメラについて」にまとめていますので、下記をページを参照ください。
ステレオビジョンRoboVision2sの主な機能
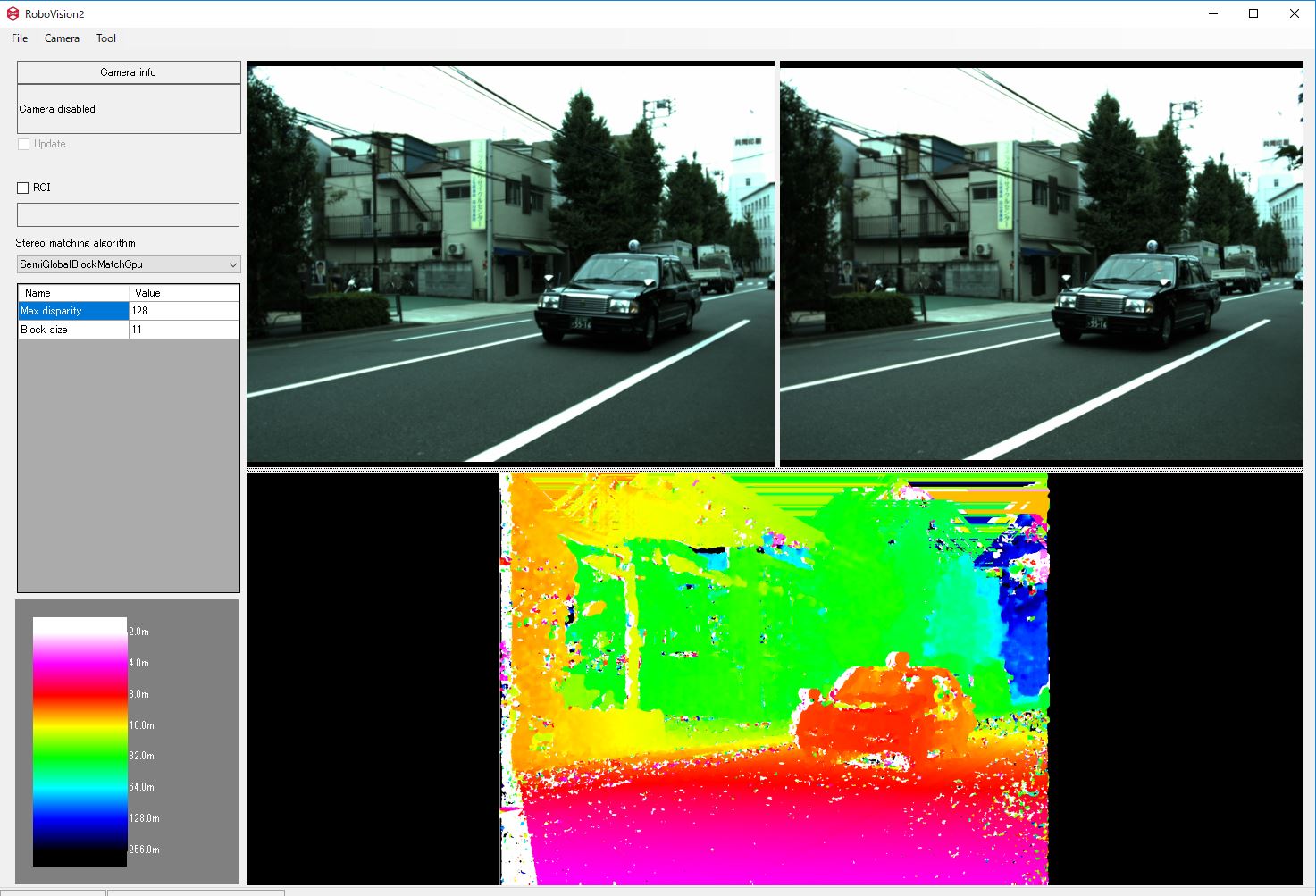
ZMPではハードウェアからソフトウェアまで一貫して設計・製造を行っています。付属のアプリケーションの機能により、カメラで撮影した写真(画像)から特定の物体までの距離を短い時間(高フレームレート)で計測。ステレオカメラの画像処理による視差情報で立体(3D)での距離認識をするため、空間内で物体の検知、追跡も画像処理ソフトによりリアルタイムかつ高精度で可能にします。
ステレオカメラからの画像取得
2台のカメラの画像サイズを指定し、画像を計測。最大1280×960ピクセルで30fpsのカラー映像の取得。また、SSDを活用することで4時間以上の連続計測も行えます。

高精度な物体の距離認識・計測
特定の条件下においては、約130m離れた対象物の距離を約1%以内の誤差で計測。100m以上先の対象物の距離の計測が可能です。

RoboVision2で撮影した生画像。赤点はレーザ測距装置で計測した約40m~135mの各ポイント
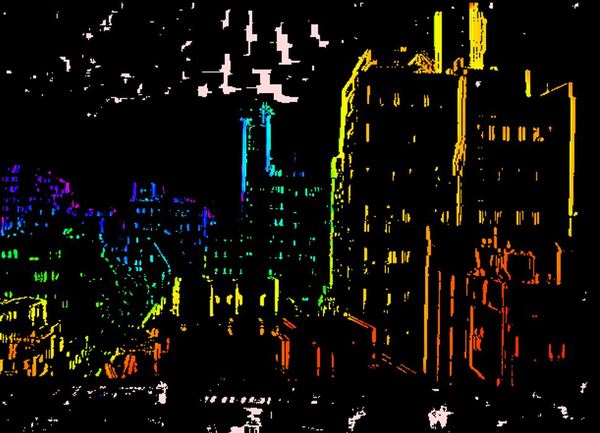
背景と大きな変化がある建物のエッジ部を抽出して距離情報を算出した画像
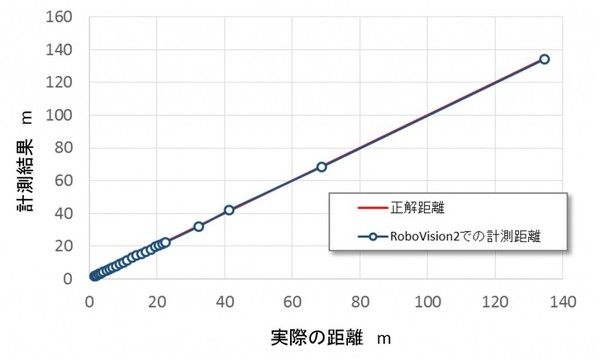
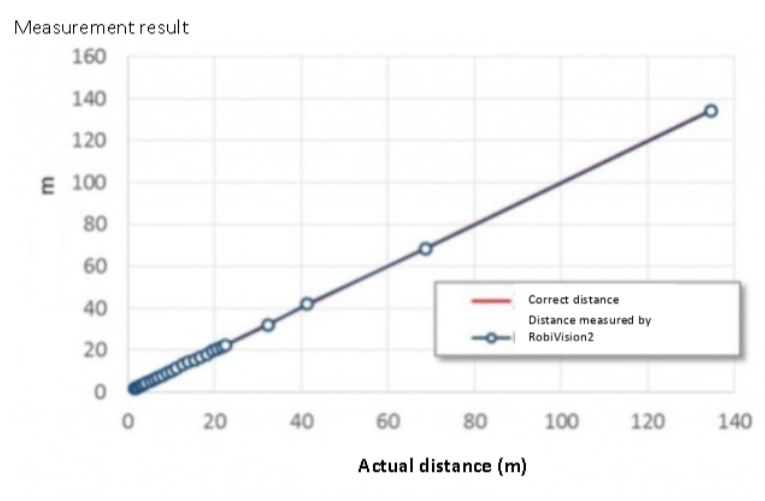
レーザー測距装置で計測した距離とRoboVision2での計測距離をプロット
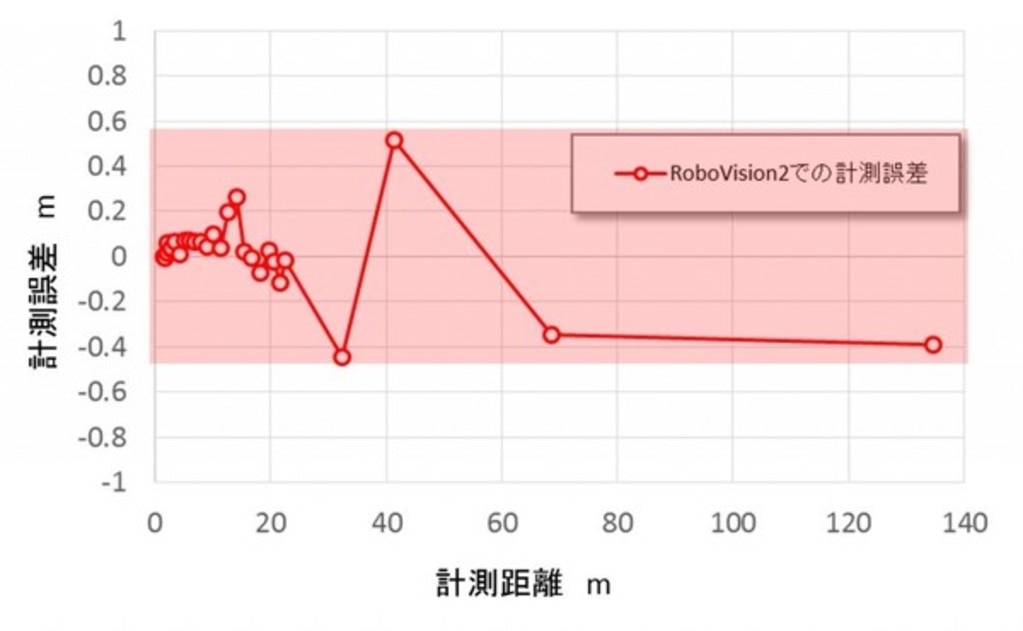
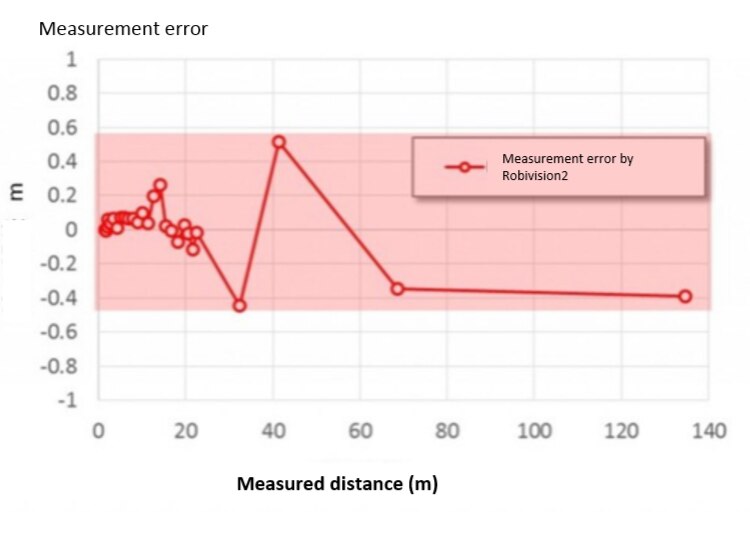
実際の距離とRoboVision2の計測の差。140m近辺でも0.5m以下の計測誤差となった。
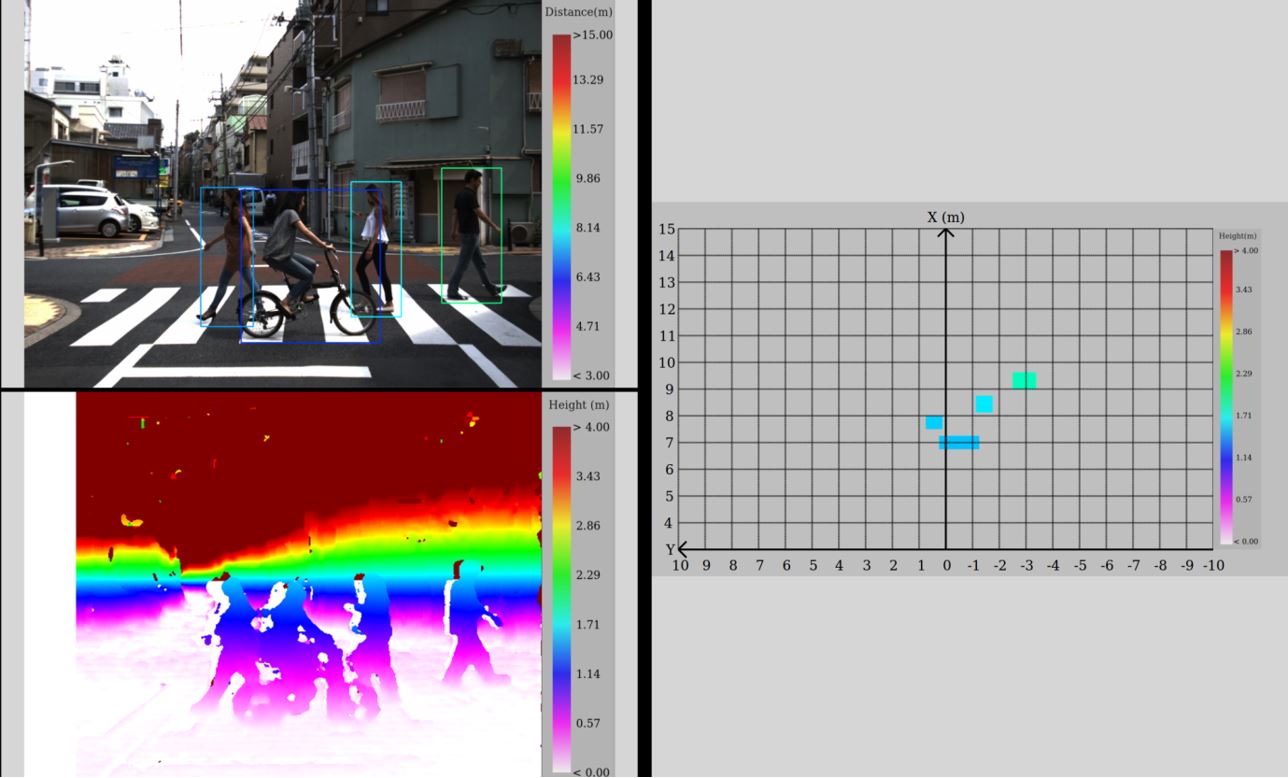
点群(マッチングデータ)による物体検知
視差および距離計測データから3次元的に点群情報を取得、物体の有無、その位置および幅・高さ(サイズ)を出力します。
※本機能はオプションソフトの物体検出ソフトウェアにて対応しております。
※本機能はオプションソフトの物体検出ソフトウェアにて対応しております。
ステレオカメラの使用用途
現在、ステレオカメラシステム(ステレオビジョン)は様々な所で活用されておりますが、ここではRoboVision2sの使用用途についてご紹介いたします。
自動車先進運転支援システム(ADAS)
ステレオカメラはアイサイトなどに代表されるような、カメラで前方の障害物を検出・位置予測し、衝突を防止(回避)する自動ブレーキサポートなど、自動車先進運転システム(ADAS)に応用されております。
自動運転開発
ZMPでも取り組んでいる自動運転開発にも、ステレオカメラは周辺の障害物の検出や白線検出・信号検出などの画像認識、またポイントクラウドマップ(点群情報)を活用した自己位置推定などに活用されています。
画像処理技術開発
ステレオカメラを使うことで、画像を距離の情報を活用し、路面状態検出など画像処理アルゴリズムの開発において、前方の障害物の認識と距離の計測を合わせて行いより精度のよい物体認識制御に適用可能です。
セキュリティ対策
セキュリティや予防安全対策にステレオカメラを設置し、人が見えない所をカバーし、物体検出機能や画像認識技術を使った人の検出などに活用されています。
ステレオカメラの画像処理について
ステレオカメラの画像処理においては、人の目が立体的に空間の配置を把握するように、左右に並んだ2台のカメラで撮影したイメージ(計測画像)をカメラからの左右、奥行きも含め立体的に計測します。画像のキャリブレーションも行い、レンズによる写真の歪みの補正や平行化処理により、視差情報より精度の高い距離の計測、物体の検知やトラッキング(追跡)が可能になっております。
独自キャリブレーション手法の採用
精度向上とロバスト性を向上させるため、独自のキャリブレーション手法を採用。作業上の精度を向上させるため専用のキャリブレーションボードの採用し、画像変換もCanonical Imageへの変換を行い、確実に画像の格子点位置を正確に抽出する手法を採用。また、光学フィルターやレンズも改良しモアレや偽色の影響を低減。
WDR(Wide Dynamic Range)機能
WDR(ワイドダイナミックレンジ)とは、暗い画像と明るい画像を処理して暗部を明るく、明部を暗くすることで、適度な明るさの画像を作り出す機能のことです。ワイドダイナミックレンジ機能を使うことで、明るい画像と暗い画像を組み合わせることで、画像の明るい部分と暗い部分のどちらも鮮明な映像が取得できます。
物体検出アルゴリズム
物体検出のアルゴリズムは、カメラの取り付け姿勢を指定することにより、計測画像における地表面(路面高さ)を算出し、路面高さに対して高さがあり点群(マッチングした点)が集まった領域に対して、物体があると判断し、その物体の幅、高さ、カメラからの位置を出力します。
前車追従機能
路面推定の高さの精度向上と路面からの相対的な高さをから物体の検出を行うことで、前車の追従機能を搭載したアルゴリズムを開発。検出した結果はCANで出力が可能なデバイスも備え、開発中センサーのリファレンスセンサーとしても活用可能です。
ステレオカメラRoboVision2sの説明動画
下記に、ステレオカメラユニットRoboVision2の製品説明動画もございますのでご参考にご覧いただければと思います。
ステレオカメラRoboVision2sの価格
■RoboVision2s 90万円(税別)
(RoboVision2s本体、車載用マウント、USBケーブル、CD-ROM(マニュアル,SDK))
■RoboVision2s PCセット 130万円(税別)
(上記RoboVision2s一式および、処理用PCのセット)
■RoboVision2s SSDパッケージ 140万円(税別)
(上記RoboVision2s一式および、処理用PC、画像記録用SSD(2TB)のセット)
(RoboVision2s本体、車載用マウント、USBケーブル、CD-ROM(マニュアル,SDK))
■RoboVision2s PCセット 130万円(税別)
(上記RoboVision2s一式および、処理用PCのセット)
■RoboVision2s SSDパッケージ 140万円(税別)
(上記RoboVision2s一式および、処理用PC、画像記録用SSD(2TB)のセット)
Web相談・無料デモ 申込フォーム
RoboVision2sは、Webでの導入相談やデモなどを受け付けております。
ご興味ございます方はお気軽にお問い合わせください。
ご興味ございます方はお気軽にお問い合わせください。
ステレオカメラRoboVision2sのオプション製品

RoboVision2s
物体検出ライブラリ
ポイントクラウドデータを用いた物体検出機能を搭載したライブラリ

RoboVision2
SSDパッケージ
外付けSSDへ画像を保存し、最大4時間の連続計測が可能なパッケージ

最新ステレオカメラシステム
RoboVision3
最大150m、水平110°の距離と視野のセンシング可能なステレオカメラ

製品のお問い合わせ・カタログダウンロードはこちら






© ZMP INC. All Rights Reserved.