自動運転用コンピュータIZAC® 汎用開発ツールOpenCV・ポイントクラウドライブラリに対応
自動運転用コンピュータIZAC ®
汎用開発ツールOpenCV・ポイントクラウドライブラリに対応
-認知・判断・操作をリアルタイムで行う自動運転車・自律移動ロボットの開発に-
この度、株式会社ZMP(東京都文京区、代表取締役社長:谷口 恒、以下ZMP)は、自社開発の自動運転用コンピュータIZAC(アイザック)を汎用開発ツールであるOpen CV・ポイントクラウドライブラリ(PCL)への対応を開始致しました。
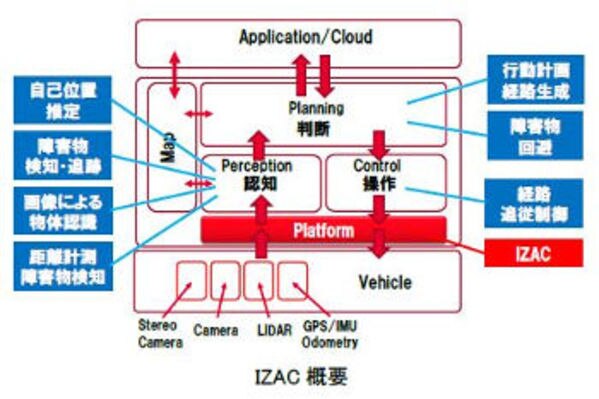
IZACは、自動運転に必要となる認知・判断・操作の機能をライブラリ化し効率的に開発を進めることができるハードウェアとソフトウェアの統合システムです。当社開発の自動運転車RoboCar® MiniVanに搭載し自動運転技術開発プラットフォームとして販売するとともに、公道での各種実証実験に使用しております。また、宅配ロボットCarriRo® Deliveryにも搭載し、各種実証実験で使用しております。
IZACは、インテル高性能プロセッサをメインCPUに使用し、リアルタイム性を要求されるタスクと非リアルタイムなタスクをワンボックスで制御可能です。フレームワークとしてOROCOS(Open Robot Control Software)を採用。OROCOSは、2000年に構想されたロボット制御のフレームワークであり、同じくロボット制御に用いられるROSに比べリアルタイム性に優れており、ドイツAUTONOMOS社(オランダTomTomの子会社)の自動運転車にも採用されております。IZACは、OROCOSフレームワークを用い、周囲環境認識、制御、軌道生成など自動運転に必要となるアルゴリズムをコンポーネント化し、タスク監視、モニタ、ロギングなど、アプリケーション開発のための仕組みを提供しております。
Open CVは、オープンソースの画像認識機能のソフトウェアライブラリであり、カメラ映像から白線検出や信号検出などに活用が可能です。PCLは、オープンソースの3次元点群処理のためのソフトウェアライブラリで、ステレオカメラやレーザーレーダ(LiDAR)から得られる3次元データを入力として本ライブラリを用いることにより、自車位置の特定や障害物の検出などに活用が可能です。
自動運転車や自律走行ロボットにおいては、カメラやレーザーレーダを用いた周囲環境のセンシングが必要となります。この度、IZACがOpen CV・PCLに対応することにより、オープンソースソフトウェアの活用による開発・検証の加速や効率化、お客様の開発アルゴリズム・ソフトウェア資産の活用が期待できます。
IZACの価格は、350万円(税別)~で、本日より受注を開始致します。
自動運転用コンピュータ IZAC
https://www.zmp.co.jp/products/izac
【特徴】
・リアルタイム性を要求されるタスク(ダイナミクスの制御等)と、非リアルタイムなタスク(大量のストレージへのアクセスやネットワーク等 )をワンボックスで制御可
・センシング(周囲環境認識)/制御/軌道生成/推定アルゴリズムなど自動運転アルゴリズムをコンポーネント化
・ユーザーによるアプリケーション・独自制御システム実装が可能(C/C++)
・シンプルで堅牢なタスクの並列実行、タスク間協調の仕組みをミドルウェアとして提供
・タスク監視、モニタ、ロギングなど、ユーザータスク開発のための仕組みを提供
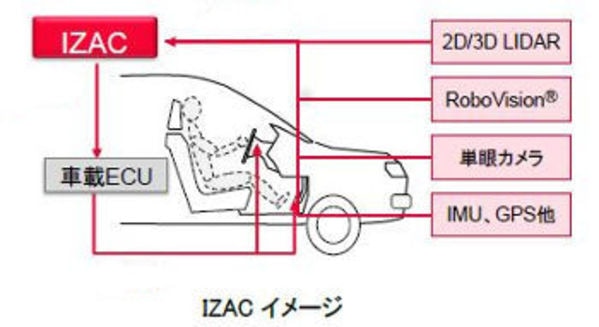
【対応外界センサ】
ステレオカメラ ZMP RoboVision2(https://www.zmp.co.jp/products/robovision2)
単眼カメラ Pointgley Blackfly/Grasshopper
3D LIDAR Velodyne HDL-32E/VLP-16
2D LIDAR IBEO SCALA
【IZAC搭載例】

http://www.zmp.co.jp/products/robocar-minivan http://www.zmp.co.jp/products/carriro-delivery
【価格】
IZACベースパッケージ 350万円(税別)~
<構成>
・IZAC
・基本ソフトウェア(OROCOSフレームワーク、ADMIN機能、他)
目的や実装するシステムに応じてご提案致します。詳しくはお問い合わせ下さい。
プレスリリース記事
プレスリリースPDFはこちらからご確認いただけます。