
倉庫・工場で自動運転?物流支援ロボット「CarriRo」の仕組みに迫る
「選ばれる理由は、自動運転で培った『技術力』でした」

①他社にはマネできないワケがあった
編集部:
キャリロの他社にはない強みはどこにあるのでしょうか?
笠置さん:
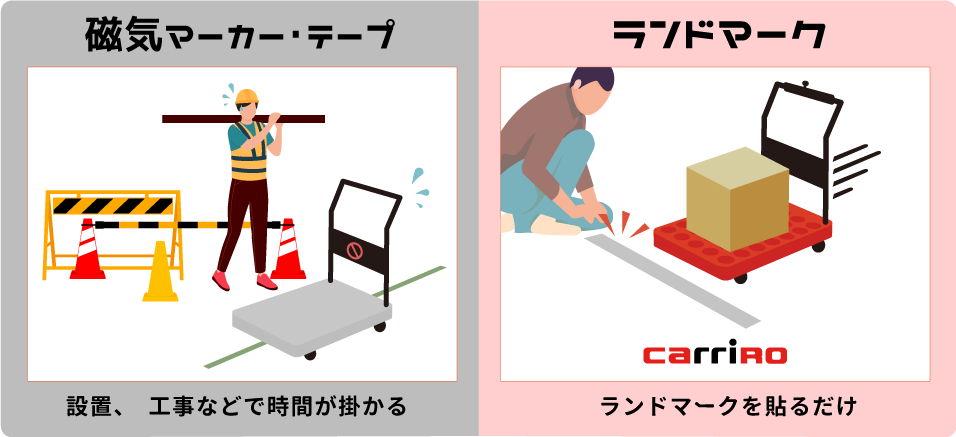
大きく3つの理由があります。1つ目は「導入のしやすさ」です。これまでのAGV(無人搬送車や無人搬送ロボット)は、床に磁気テープを張り、数か月かけて導入するものが一般的でした。これでは物の配置が常に変化する倉庫・工場には対応することが出来ません。一方キャリロは、簡単に設置できるランドマークを張るだけでルートを決めることができるため、工事もなく、変化にもすぐに対応できるという特徴があります。
笠置さん:
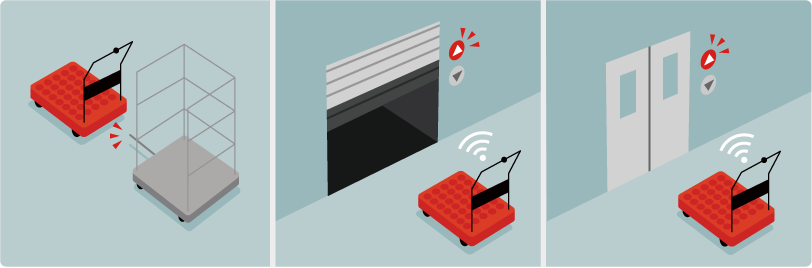
2つ目は「拡張性」です。これまでのAGVは、導入した時点で出来ることが決まってしまいその後のバージョンアップが出来なかったり、たくさんの機能をもったフルパッケージのみの販売のため、使わない機能が無駄になってしまうという課題がありました。キャリロでは、導入の際には必要な機能のみで1台からでも販売しています。そして、もし追加で機能をつけたい場合は、導入後でも好きなタイミングで拡張することができるという仕組みになっています。拡張機能の例としては、搬送に付随するエレベーターやシャッター連携、クラウド管理のシステム(ROBO-HI)などがあります。
笠置さん:
3つ目は「コストパフォーマンス」です。ZMPは既に自動運転という最先端技術のノウハウを持っています。他社であれば一から開発しなくてはいけない技術も、自動運転の要素技術を使うことで比較的安価に開発することができます。そのため、最大限の効果をリーズナブルな費用で導入可能です。

②キャリロ独自の追従機能と自律移動モード
追従機能「カルガモモード」の『技術』
編集部:
キャリロの便利な追従機能「カルガモモード」はどのような仕組みで動いているのでしょうか?
笠置さん:
「カルガモモード」はキャリロがビーコンに反応して一定の距離間隔で追従する機能です。
笠置さん:
このビーコンからは赤外線が出ており、キャリロの前方についている黒い目のようなステレオカメラで赤外線を読み取っています。二つのカメラで読み取ることによって、ビーコンの位置と距離がわかり、一定の距離を保ちながら走行するように制御することで追従機能が実現できるのです。

笠置さん:
さらに、人が違和感なく使えるようにするために「滑らかな制御」がされています。例えば、単純に距離だけを保とうとすると非常に直線的な追従になってしまいます。その途中に人が曲がると斜めにショートカットをした追従になり、その経路に壁がある場合は止まってしまいます。そこで、ビーコンの「軌跡」を追うアルゴリズムを組むことで、人に近い滑らかな動きができるようになります。これも自動運転開発の中で培われた技術であり、ZMPの強みとなります。
「自律移動モード」の『技術』
編集部:
キャリロ独自のランドマークを使用した「自律移動モード」はどのような技術が使われているのでしょうか?
笠置さん:
ランドマークというのは、縦10cm×横1mのシールのようなものです。その上には「直進、曲がる、止まる」といったアクションを表す2次元マーカーが印刷してあり、キャリロに搭載しているカメラで読み取ることで次の行動を決めていきます。
これを床に張りつけ、キャリロがその上を走行することで指示を読み取って移動します。これが自律移動モードです。
笠置さん:
ランドマークを読み取ることができないと作業が止まってしまうため、読み取りの信頼性を向上させることには非常にこだわりました。
もしも、何の工夫もしていないキャリロが、ランドマークの上を走行するとします。するとキャリロ自身の陰で暗くなってしまい、マーカーをカメラで読み取れなくなってしまいます。これを改善するため、LEDライトで常に床を照らすという工夫がされています。また、ライトの当て方によっては反射して読み取れなくなってしまうため、入念な角度の微調整がされています。
さらに、ランドマークの読み取り後、まっすぐ次のランドマークへと進む直進性も大切になります。この直進性を実現するため、キャリロではランドマークへの進入角度が異なっていても正しい進行方向へ修正する技術があります。

まとめ
今回は「自動運転」の技術を持っているZMPだからこそ実現できる物流支援ロボット「キャリロ」の機能を詳しく聞いてきました。
「そろそろ搬送を自動化したい」「うちでも導入できるかな?」「実際に体験してみたい!」など
キャリロ導入や体験のご相談を、ぜひお気軽にお問い合わせください。
ニュース・プレスリリース
関連動画
自動運転・物流を知る|ZMP編集部
ロボット社会の頭脳?
「ROBO-HI」
倉庫・工場で自動運転?
物流支援ロボット「CarriRo」の仕組みに迫る
自動運転の技術と仕組みがわかる!
ラクロに学ぶ実用化への道







© ZMP INC. All Rights Reserved.